將針頭插入容器中相應的位置.
聯系方式
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
關注我們


視覺部分需求:
1相機從下往上拍照。
2定位:±5條(需要保證運動控制部分的精度)
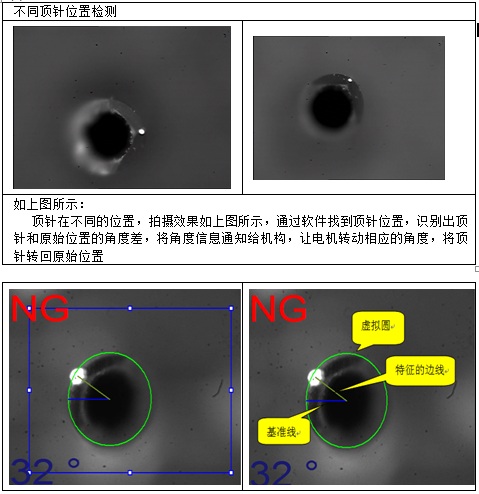
3 角度精度:±2度
視野大小(FOV):2.4mm x1.8mm
相機數量:1顆
相機分辨率:1280x960(130萬)
視覺精度:2.4mm/1280Pixel =0.001875mm/Pixel
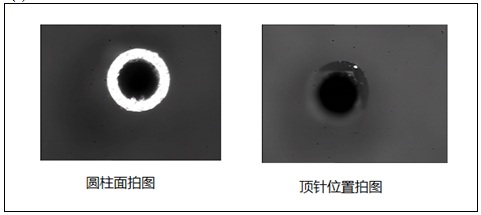
裝針檢測插針機設備視覺需求細分
| 項目 | 具體指標 |
| 需定位調整物體 | 針頭 |
| 待貼物體 | 過濾器容器 |
| 視野范圍 | 2.4mm x 1.8mm |
| 像素精度 | 0.001875mm/Pixel |
| 定位精度 | ±0.05mm |
| 最終定位精度 | ±3條(±0.03mm) |
| 角度精度 | ±2度 |
| 定位方式 | CCD自動對位 |
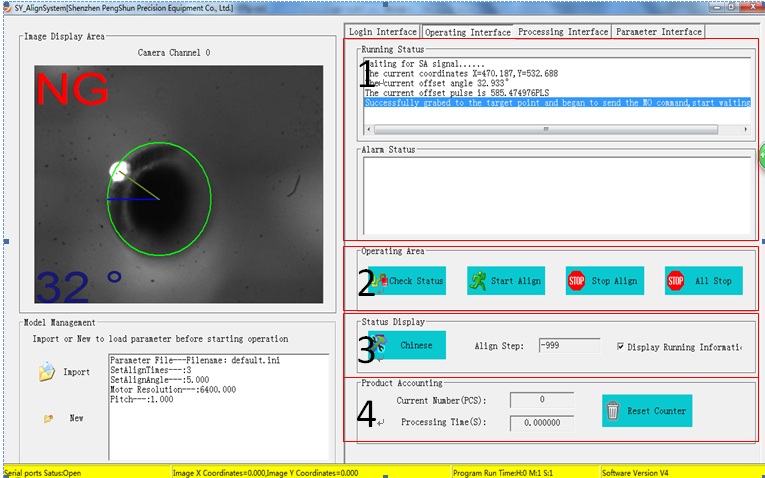
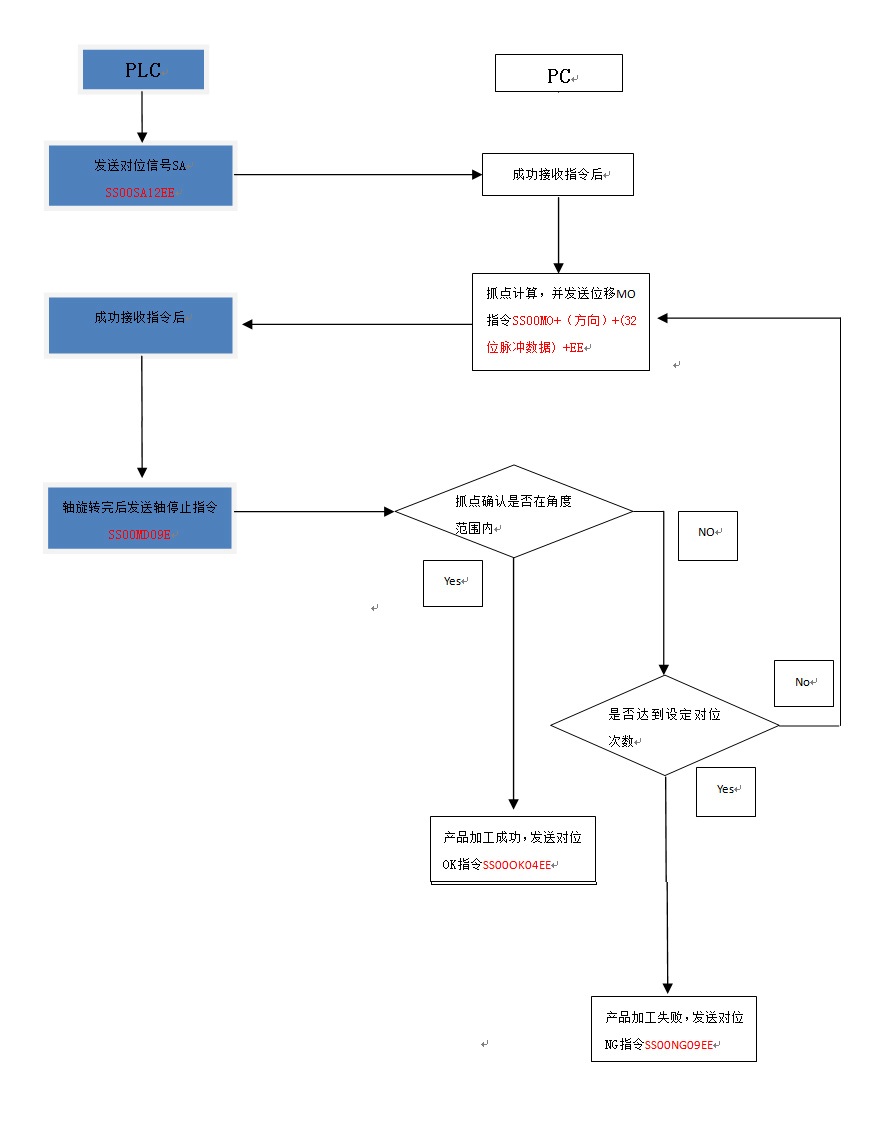
設備控制架構
我們采用軟件加硬件的控制架構,圖像處理部分(圖像采集、圖像分析處理、定位算法等)均采用基于PC-Based來進行開發。| 產品描述 | 視野范圍 | 分辨率(Pixel) | 視覺精度 |
| 德國工業相機 | 2.4mm x 1.8mm | 1280x960 | 0.001875mm/Pixel |
| 遠心鏡頭 | 2.4mm x 1.8mm | 百萬像素分辨率 | - |
| 日本WaveCrest工業級光源 | 低角度無影環形紅光 | ||
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A