熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A


MasterAlign四相機錯開對位視覺應用軟件
MasterAlign四相機錯開對位貼合覺應用軟件提供一種智能機器視覺圖像處理方法,提供建模工具,快速提取圖像中的待處理物件邊緣點像素坐標信息。并結合視覺與運動執行結構的標定,轉換為機械坐標信息,控制機械手進行糾偏,修正固定位置后進行貼合作業,大大提高的生產效能。
MasterAlign四相機錯開對位貼合視覺應用軟件采用視覺引導,與現有的技術方法相比,利用視覺引導及利用建模工具,加快了產品邊緣點像素獲取并轉換成執行機構坐標,減少換型消耗的時間。利用建模工具的亞像素提取輪廓能力,提高了待處理產品的位置精度。本方法已于實際生產加工流程中發揮其有效的作用
1、產品建模方便快捷,減少產品換型帶來繁瑣操作的困擾
2、控制機械手精準對位
3、軟件適用于不同行業的物料對位
MasterAlign四相機錯開對位貼合視覺應用軟件配合UVW平臺案例
系統架構
視覺定位系統采用背面光方式,CCD從上往下拍攝,進行圖像分析定位。相機將計算出的像素坐標轉換為機械手的物理坐標,視覺軟件與PLC進行通訊,將視野內的物理坐標發送給PLC后讓機械手進行糾偏,修正固定位置后進行貼合作業。
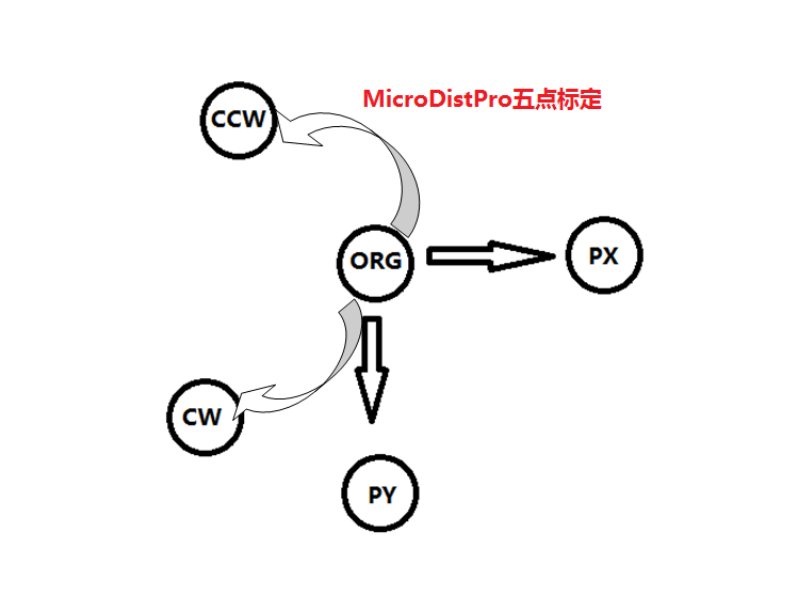
系統采用五點標定,通過軟件控制XYR平臺自動完成相機和機構的關系建立
設置軟件配置

設置軟件配置-基礎參數
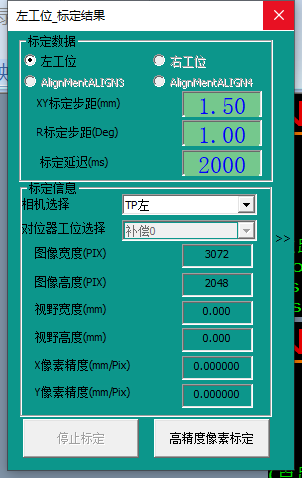
設置五點標定步距和旋轉角度
軟件主頁

軟件權限登錄

選擇軟件圖標

在下拉菜單選擇用戶
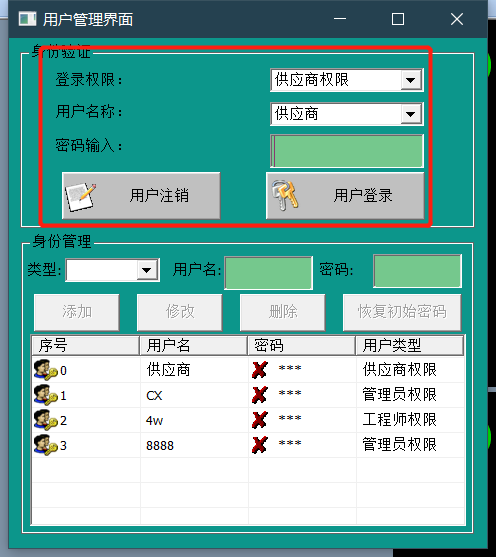
在用戶登錄界面進行登錄,選擇“登錄權限”“用戶名稱”輸入密碼(供應商密碼:310525),后點擊用戶登錄
料號切換

選擇軟件圖標

在下拉菜單選擇料號
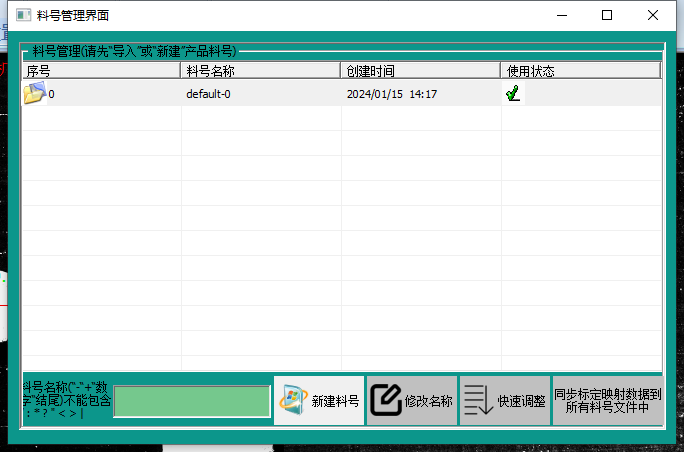
料號界面
進入料號管理頁面:
1:雙擊左鍵:將當前選擇的料號導入為當前使用的料號
2:雙擊右鍵:將當前選擇的料號進行刪除。(不可恢復)
3:在框內填入需要新建的料號名稱,后點擊“新建料號”,會創建一個新的料號,并將當前使用的料號所有數據復制到新料號內。點擊“修改名稱”會將當前選擇的料號名稱改為您所填入的新料號名稱。
軟件主頁

軟件主頁
軟件主頁包括自動工作和全體停止按鈕。

視覺系統開始自動工作
視覺系統整機復位,io復位,狀態復位
圖像系統

圖像系統
圖像系統包括主模板登錄、抓取mark測試、候補模板登錄、離線導圖、手動對位、相機設置。
主模板登錄
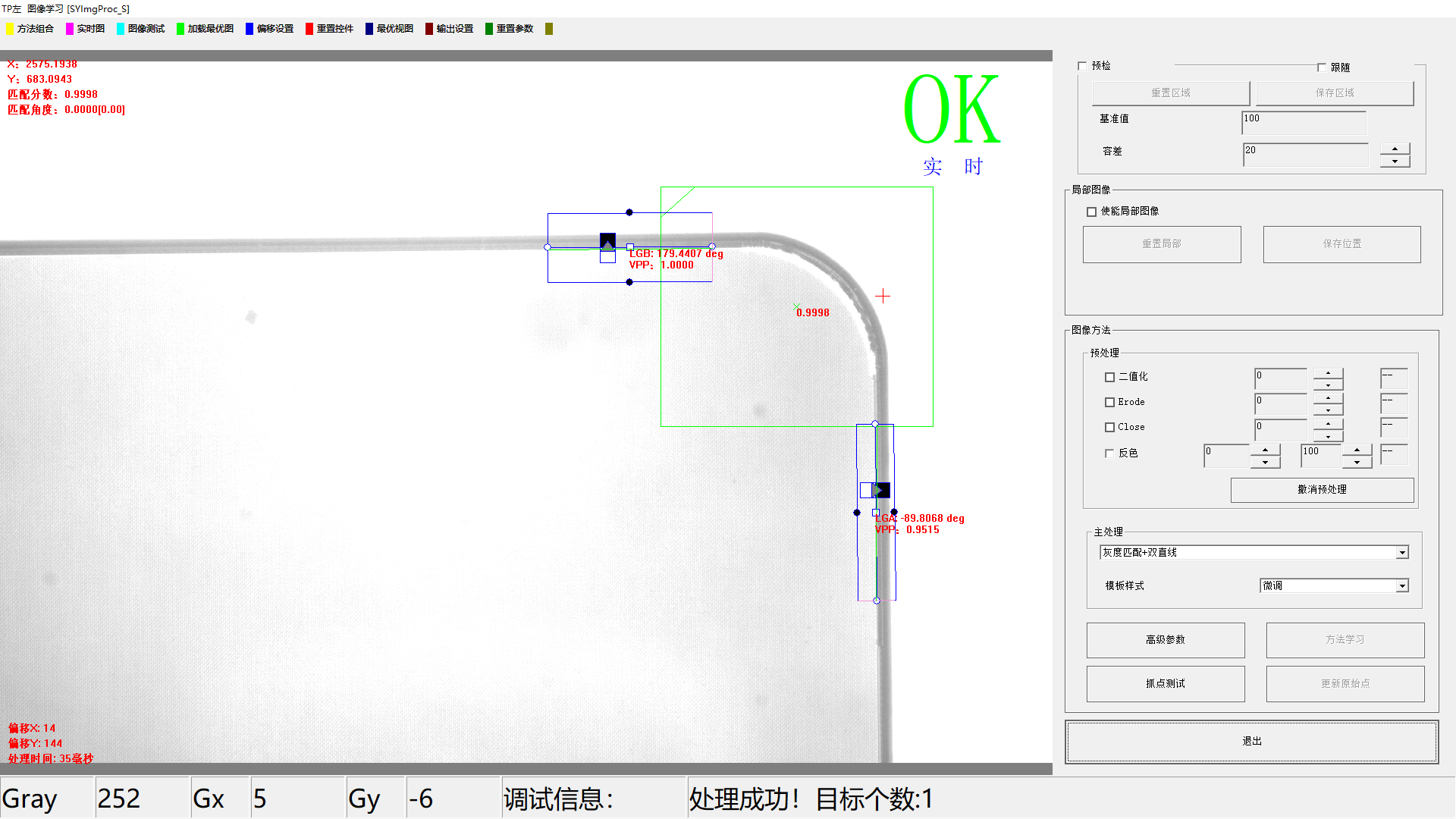
1、選擇處理方法
2、下拉重新選擇“灰度匹配+雙直線”,黃色的模板框工具則會顯示出來,調整模板框位置和大小到合適,再點擊“方法學習”,則學習記錄當前的模板。
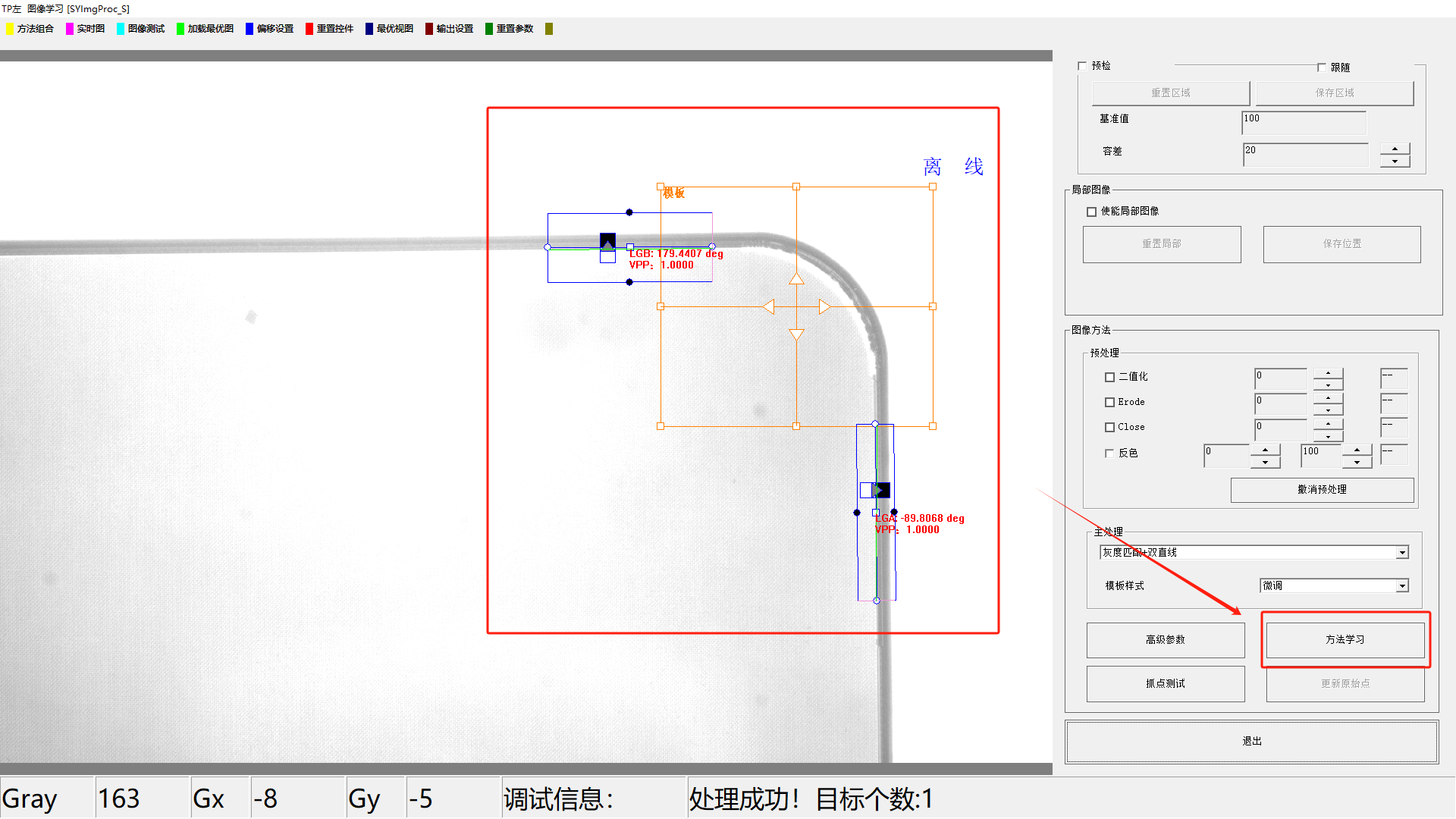
3、顯示OK則完成了模板制作
4、調整高級參數。點擊“高級參數”,進入高級參數界面,調整參數可根據實際情況修改“分數”、“個數”、“比例容差”、“角度容差”、“匹配速度”、“模糊度”等參數。
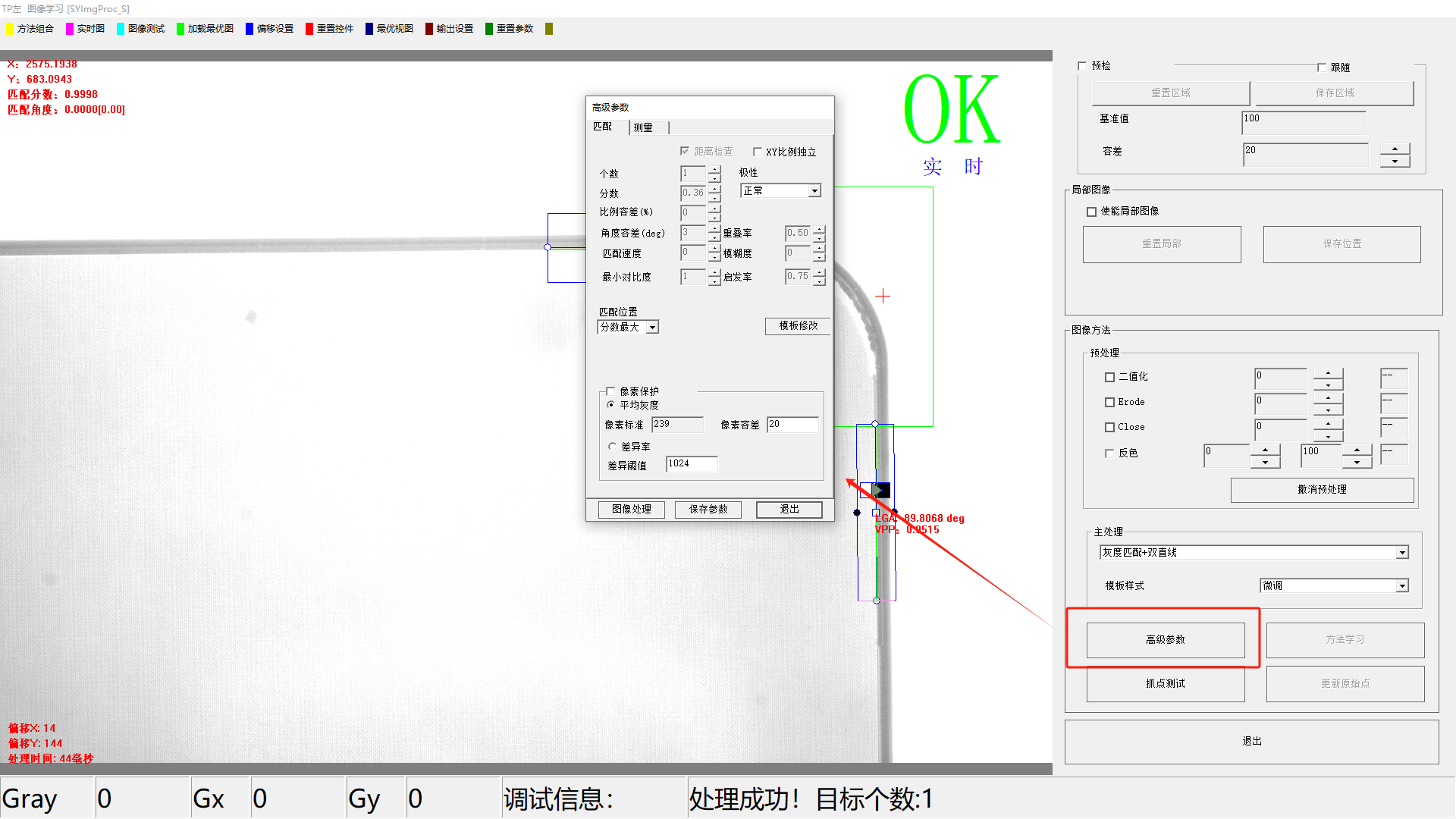
(1)個數:圖像中存在多個目標時,設置【個數】,即可返回多個目標。
(2)分數:目標與模板間的相似度分數。分數越高,表示目標與模板越相似。分數在設置值之下的目標,將會被剔除。
(3)比例容差:目標與模板的大小比例變化時,設置合適的比例容差,即可尋找大小變化的目標。
(4)角度容差:圖像中的目標發生角度變化,設置角度容差,即可更好地尋找角度發生旋轉的目標。
抓取mark測試
測試當前通道mark抓取結果。
候補模板登錄
候補模板管理:包含啟用/禁止候補模板,候補模板登錄,抓點測試等。目前系統中單個圖像通道有主模板+四個候補模板的方式;其中三個候補模板用于當主模板抓點失敗后,自動根據啟用情況,調用候補模板1,2,3進行靶標獲取,如果候補模板1,2,3同時啟用了,系統首先會調用候補模板1,如果1抓靶失敗的話,才會啟用2,以此類推。
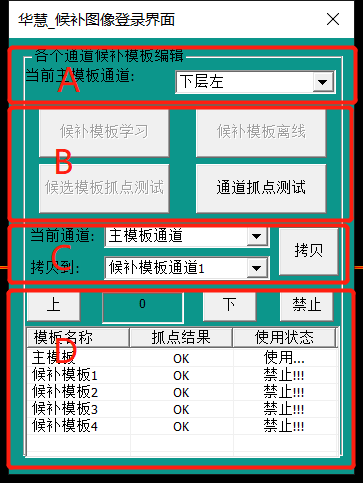
候補模板登錄
區域A:選擇需要設置的候補模板對應的主通道;
區域B:候補模板學習,離線導圖,候補模板抓靶測試以及整個通道抓靶測試;
區域C:將主模板參數拷貝到候補模板中去;
區域D:候補模板抓點結果以及使用狀態;候補模板4是專門用作標定或者映射時用。
離線導圖
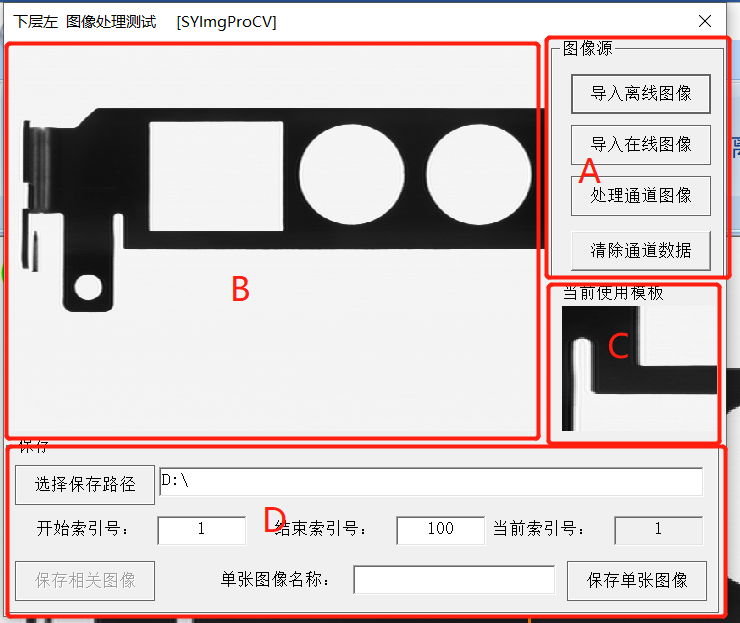
區域A:圖像源操作,導入離線/在線圖像,圖像處理以及清除當前通道數據;
備注:如果在進入圖像學習界面中出現奔潰等異常,有可能是當前料號文件中的圖像處理參數出現異常,導致用戶無法再次進入到靶標登錄界面中。用戶可以先清除當前通道數據,然后再重新導入料號文件即可。
區域B:顯示圖像以及抓點位置;
區域C:顯示當前通道使用的模板;
區域D:圖片保存文件路徑以及名稱設定操作。
相機設置
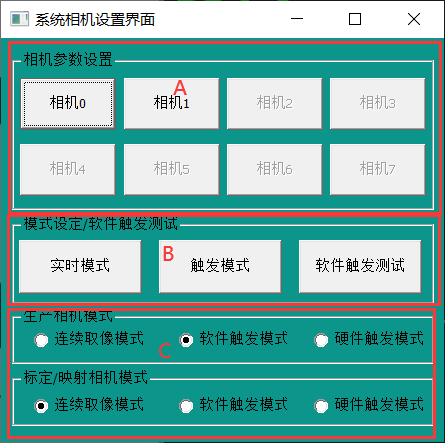
區域A: 相機參數設定,相機的參數分通用參數和高級參數;
區域B: 相機模式切換,實時模式和觸發模式以及軟件觸發測試;軟件觸發測試中包換當前相機的幀率以及丟幀情況;
區域C:生產/標定/映射時的相機模式;
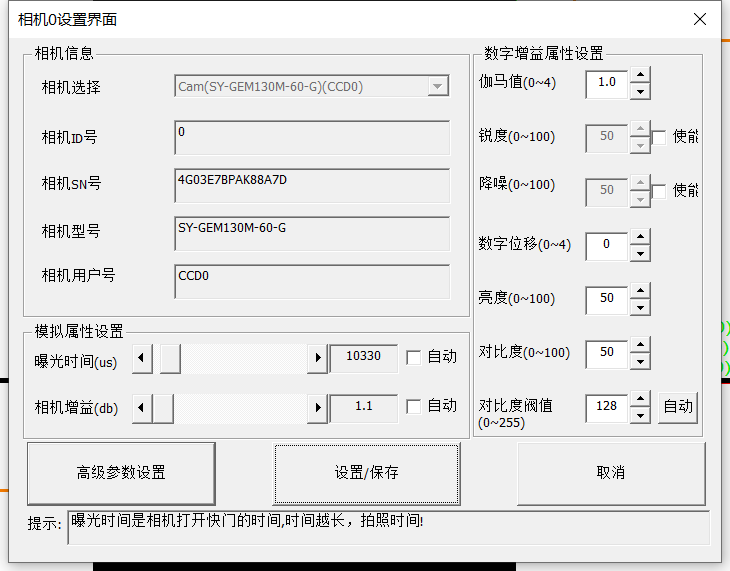
通用參數設置
參數說明:
曝光時間(us):相機打開快門的時間。曝光時間越長,圖像越亮,但拍照時間也越長!
相機增益(db):相機感光芯片的參數,以2的N次方增加亮度,調整比較靈敏并且會帶來噪點,默認值是1!
Gamma伽馬值(0~255):相機感光芯片的參數,1時不起作用,小于1暗的地方變亮更多,大于1亮的地方調亮更多!
Sharpness銳度:相機FPGA的參數,邊沿銳度增強范圍是0~100。默認不啟用。
Denoising降噪(0~100):相機FPGA的參數,相機底層圖像處理功能。默認值是50,能夠降低圖像噪點,但是同時會影響邊沿銳度。默認不啟用。
DigitalShift(0~4)數字位移:相機FPGA的參數,能夠增強亮度,比較敏感。默認值是0,以2的N次方增加。
BrightNess(0~100)亮度:相機FPGA的參數,能夠增強亮度,但是相對比較平滑。默認值是50。
Contrast(0~100)對比度:相機FPGA的參數,能夠增強對比度。默認值是50。
ContrastThresholdValue(0~255)對比度閾值:相機FPGA的參數,默認值是128,大于該值是亮區,小于該值是暗區!
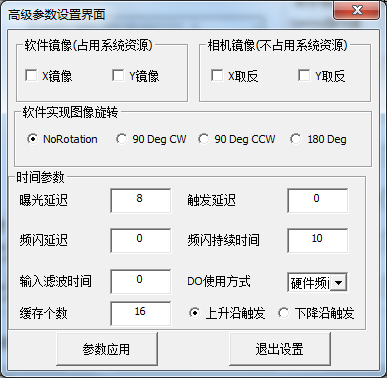
高級參數設置
參數說明:
鏡像:將圖像沿著X或Y方向進行翻轉。
軟件鏡像:通過算法將采集到的圖像進行翻轉,會占用系統資源。
相機鏡像:通過設置相機參數使圖像進行翻轉,不占用系統資源。
旋轉:將圖像按順時針或逆時針旋轉一定角度。
NoRotation:不對圖像進行旋轉操作。
90Deg CW:將圖像順時針旋轉90度。
90Deg CCW:將圖像逆時針旋轉90度。
180Deg:將圖像旋轉180度。
曝光延遲:收到曝光信號后延遲一段時間(us)后再進行曝光。
觸發延遲:收到觸發信號后延遲一段時間(us)后再進行觸發。
頻閃延遲:光源為頻閃模式時,接收到頻閃信號后延遲一段時間(us)后再進行觸發。
頻閃持續時間:光源為頻閃模式時,每次點亮持續的時間。
輸入濾波時間:對輸入信號進行濾波的時間參數。
DO使用方式:硬件頻閃、軟件頻閃、通用DO頻閃。
緩存個數:相機緩存中存儲的圖像個數。
觸發方式:上升沿觸發或者下降沿觸發。
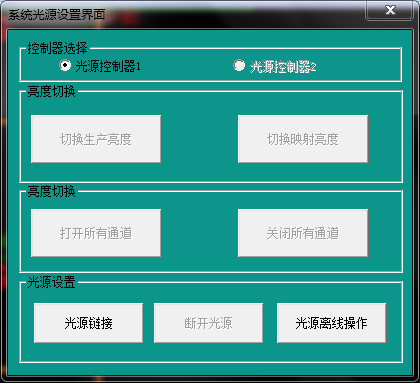
光源設置
在“圖像系統”->點擊“光源設置”,彈出光源設置界面
控制器選擇:目前系統最大支持2個光源控制器;
切換生產亮度:點擊該按鈕后4個通道光源亮度會變為生產亮度;
切換學習亮度:點擊該按鈕后4個通道光源亮度會變為學習亮度;
打開所有通道:點擊該按鈕后4個通道光源亮度都會打開;
關閉所有通道:點擊該按鈕后4個通道光源亮度都會關閉;
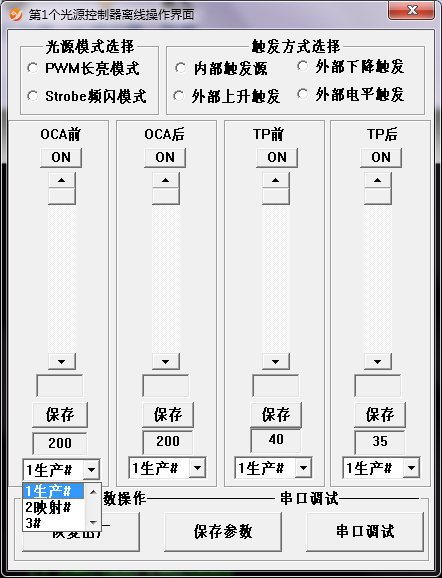
光源離線操作:點擊該按鈕后彈出“光源控制器離線操作界面”,如下圖所示;
光源模式選擇:
1. PWM常亮模式:選擇這種模式光源就通過內部信號常亮或者常滅;
2. Strobe頻閃模式:選擇這種模式光源就通過相應外部信號或者內部信號進行頻閃。
調節光源亮度:選擇生產通道或者映射通道來進行保存對應通道亮度。
光源設置
運行參數

運行參數包括對位設置、高級參數設置、五點標定、補償。
對位設置
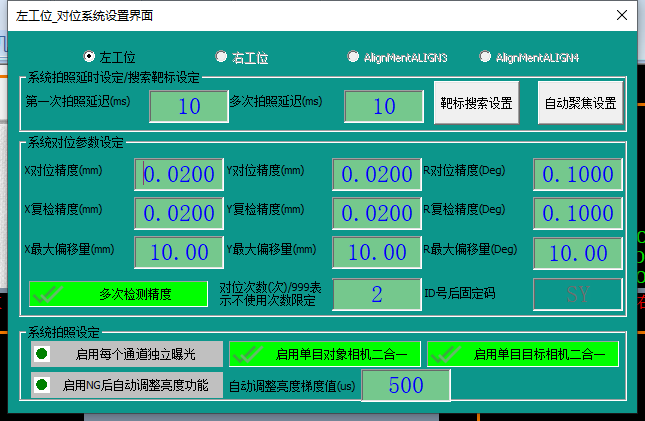
A,拍照延時:生產過程中收到PLC/Robot發送拍照信號后,延時一段時間再執行拍照采集圖像動作;
多次拍照延時:生產過程多次對位中收到PLC/Robot發送拍照信號后,延時一段時間再執行拍照采集圖像動作。
B,XY對位精度:X方向/Y方向精度上限,即視覺當前對位X方向/Y方向偏移量判定值小于設定值才會輸出對位OK;
R對位精度:角度精度上限,即視覺對位角度精度偏移量判定值小于設定值才會輸出對位OK。
C,XY最大偏移量:對位過程中對位平臺X方向/Y方向最大可以移動的距離;
R最大偏移量:對位過程中對位平臺旋轉方向最大可以移動的角度。
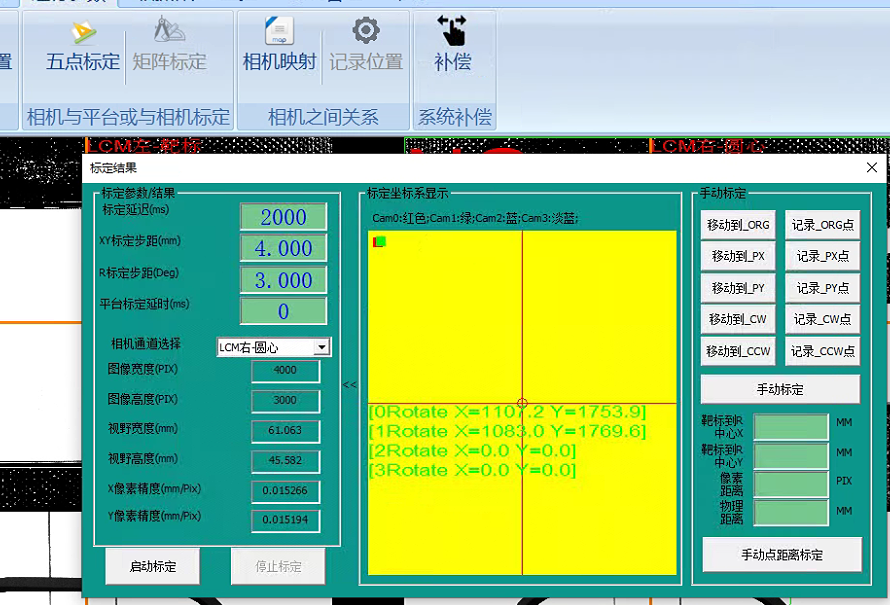
五點標定
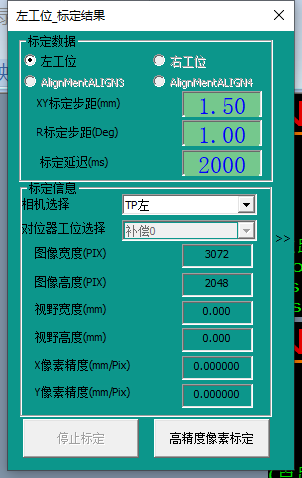
相機選擇:標定主要是針對拍攝對位平臺上產品的圖像通道;
圖像寬度:標定通道相機長邊方向像素分辨率;
圖像高度:標定通道相機短邊方向像素分辨率;
視野寬度:顯示五點標定后標定通道相機視野長邊方向長度;
視野高度:顯示五點標定后標定通道相機視野短邊方向長度;
X像素精度:標定通道相機長邊方向像素精度 = 視野寬度/圖像寬度;
Y像素精度:標定通道相機短邊方向像素精度 = 視野高度/圖像高度;
注釋:標定計算出來的視野寬,高要和實際視野接近,否則標定結果就是錯誤的,另外X像素精度和Y像素精度要接近,否則標定結果就是錯的。
點擊啟動標定后,控制UVW平臺走偏移量完成相機標定
補償
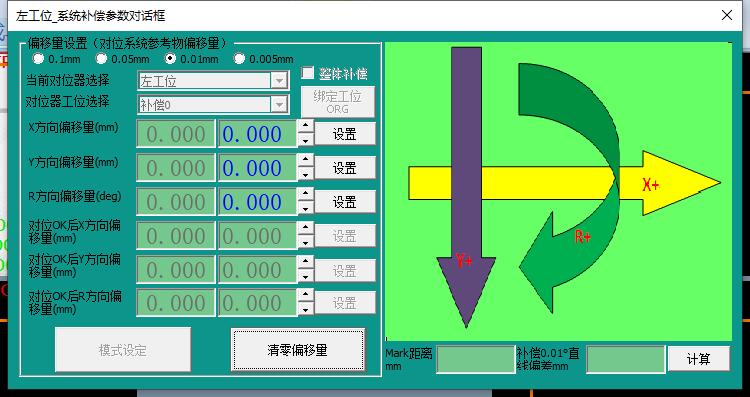
根據補償方向圖示,在右側對應的方向補償寫入補償數值后,點擊“設置”累加到左側的總補償參數中。
清零偏移量,則會將累加的總和全部清零,同樣需要點擊“保存參數”,清零才能生效。
MasterAlign四相機錯開對位貼合應用軟件通訊版本,我們以MasterAlign_LTW介紹通訊部分知識,詳情見文中所述:
MasterAlign_LTW(下文中簡稱為MA_LTW)為雙翌自主研發的視覺對位系統應用軟件,軟件中的通訊日志可方便我們進行整個通訊流程的接收和查詢流程進行分析,詳情見文檔所示:
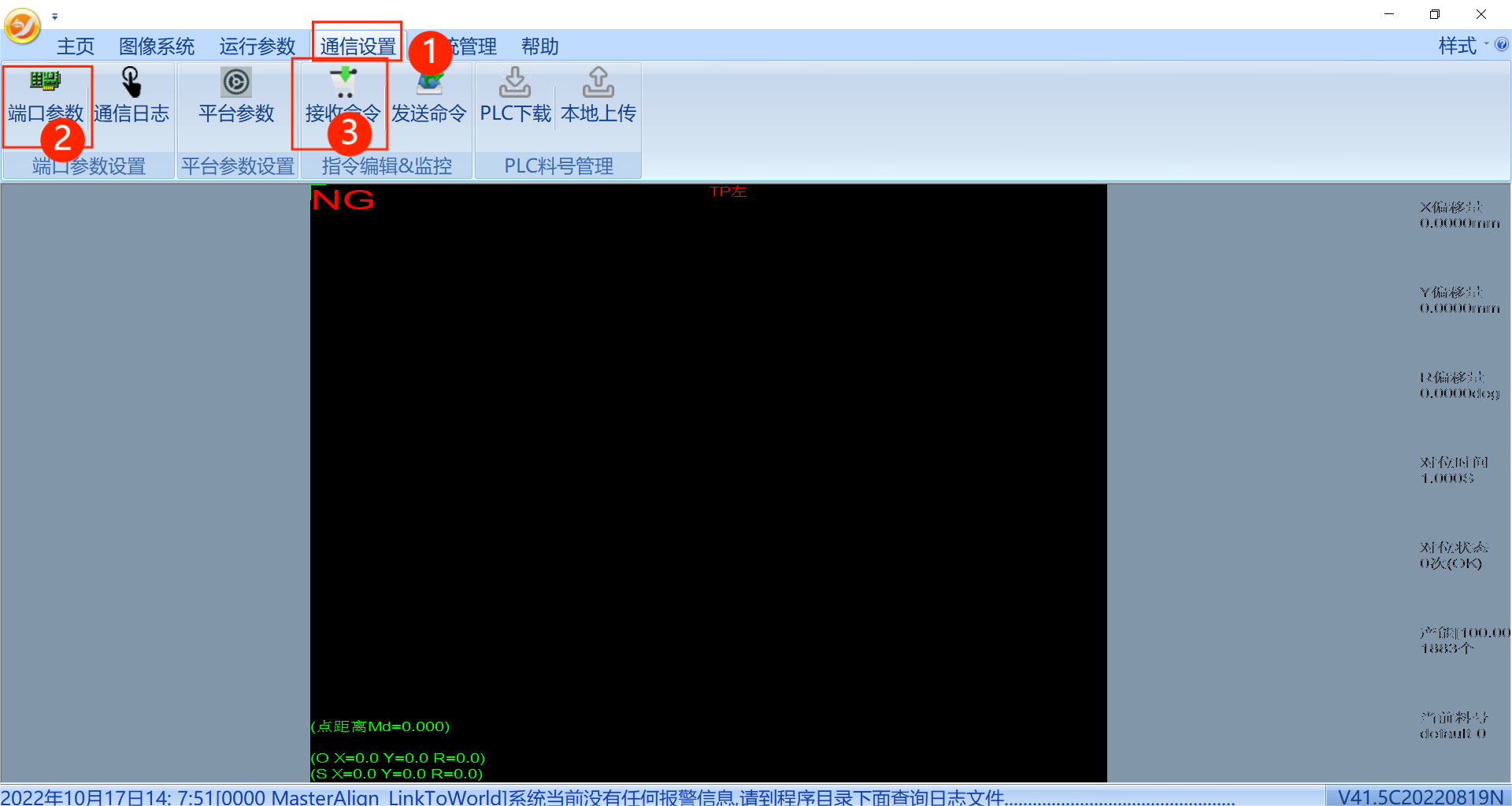
1、如何打開MA視覺對位系統通訊日志
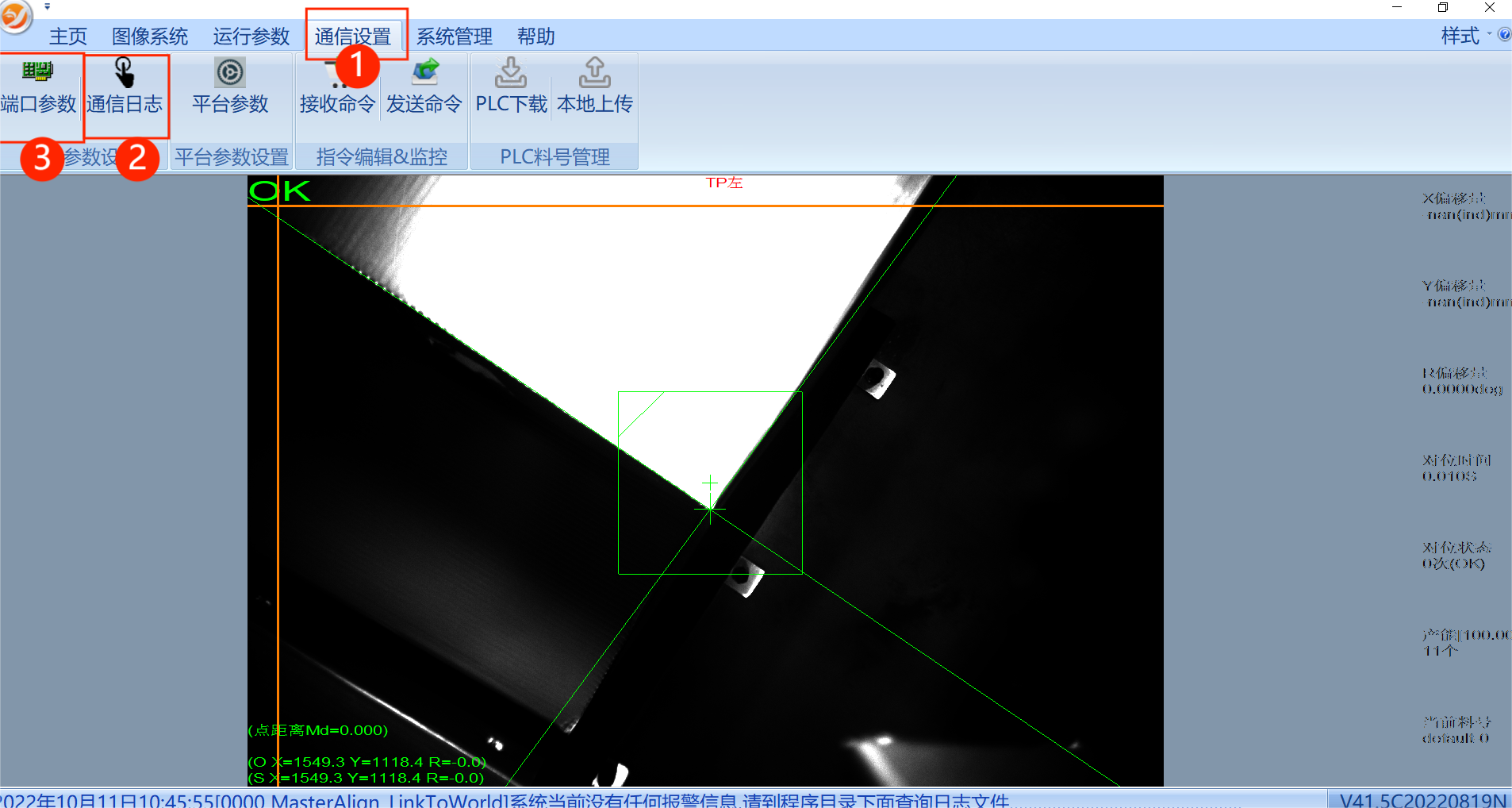
Fig.1 打開通訊日志方法
點擊圖像中①進入到通訊設置界面,點擊②③,分別打開通訊日志和端口參數界面
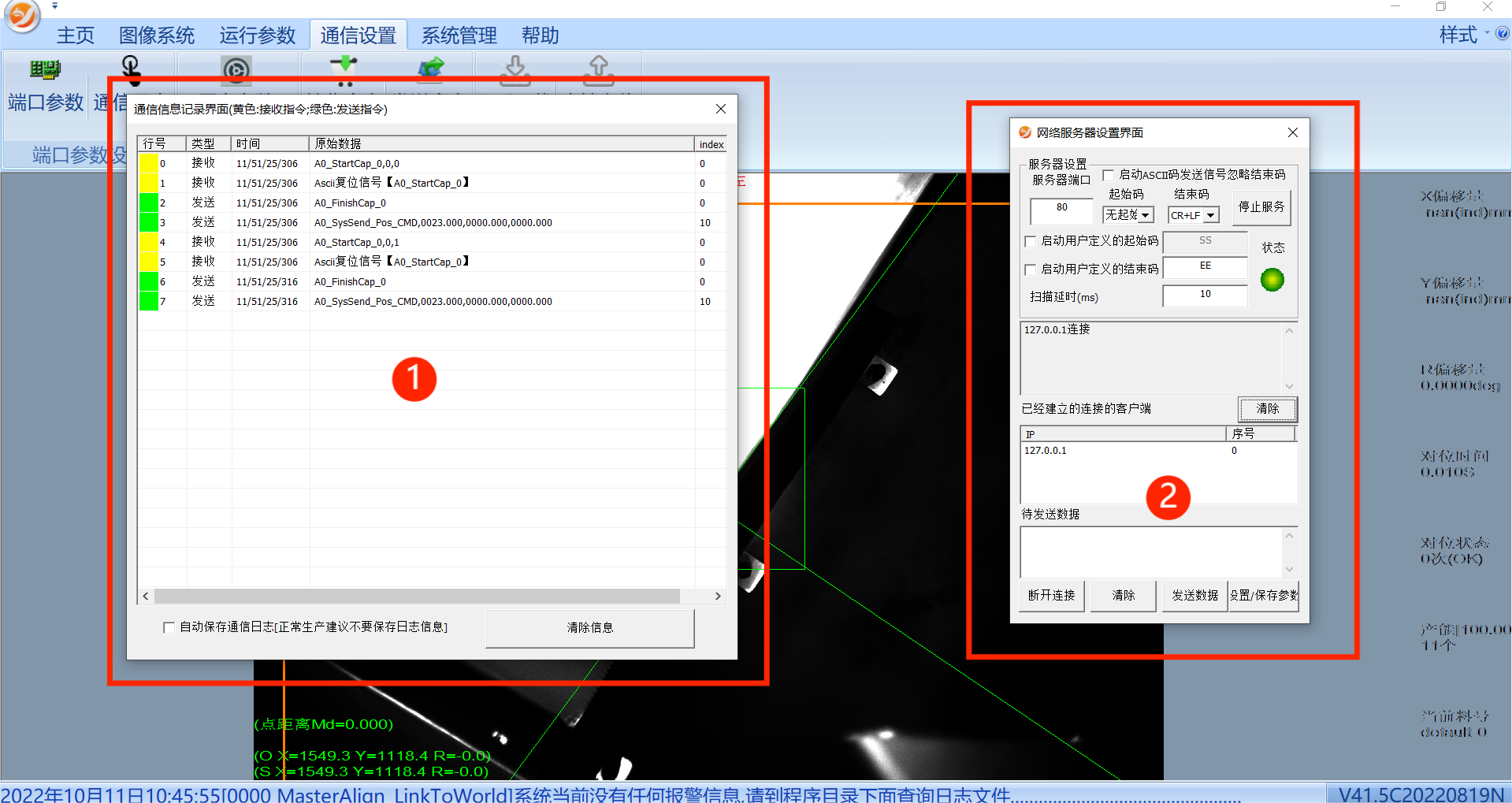
Fig.2 通訊日志和端口參數
上圖中①是通訊日志,②是端口參數
2、如何通過MA視覺對位系統通訊日志查看流程運行時間
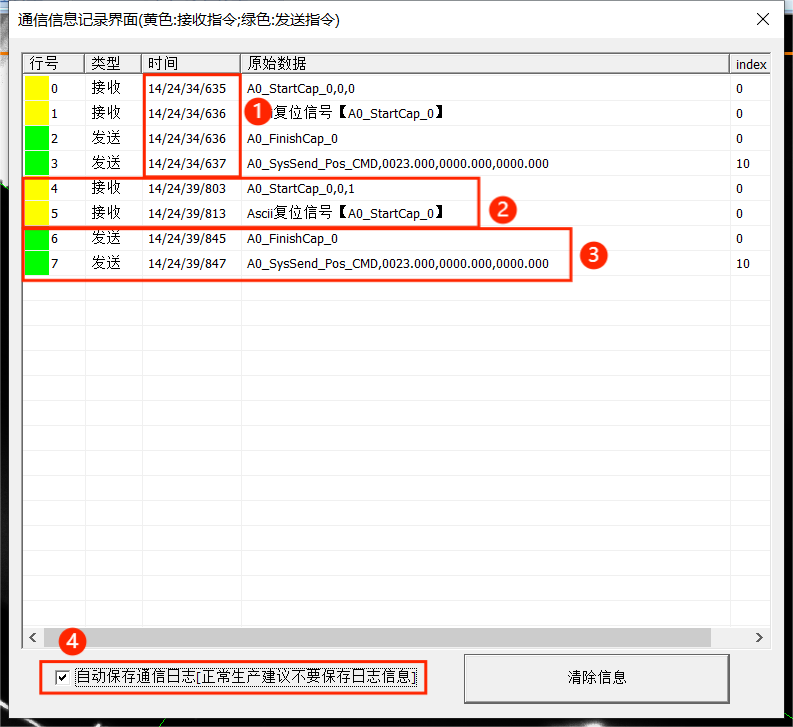
Fig.3 通訊日志界面
通訊日志:
①是一個流程的運行時間,由機器人發信號到視覺返回信號為一個通訊流程,時間是由時、分、秒、毫秒組成,例如圖中14/24/34/635 就是14時24分34秒635毫秒
②黃色是接收,機器人發過給視覺的數據和信號
③綠色是發送,視覺返回給機器人的數據和信號
④自動保存通訊日志里面的所以數據,生成數據在文件夾里面的“SYCommunicateLogFile”文件夾里面,通過存儲的日志文件可以看出發送的數據準不準確
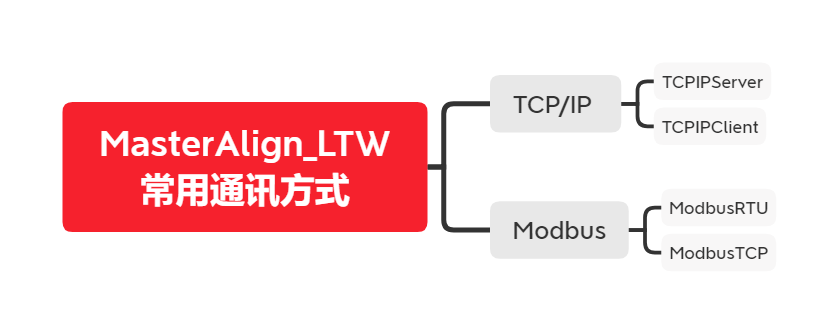
3、MA_LTW通訊方式
MA_LTW軟件廣泛應用于工業應用現場精密對位和精密裝配場合中,常用的通訊方式如下所示:
MA_LTW配合過的PLC和機械手通訊見網站鏈接所示:http://www.qk604.cn/news_99.html
3.1 TCPIPServer
這是TCP網口連接通訊,需要設置IP,視覺軟件做服務器
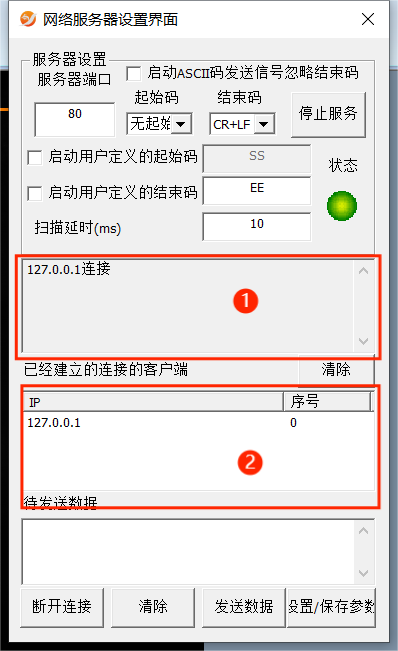
端口參數:①可以看到連接、斷開、接收的數據
②可以確認通訊是否保持連接,連接通訊的個數
起始符:通訊數據的開始標示
類型:STX是正文開始
結束符:通訊數據的結束標示
類型:CR是回車
CR+LF是回車+換行
ETX是正文結束
LF是換行
ETX+CR是正文結束+換行
更改端口、參數后需要點擊右下角“設置/保存參數”后再進行操作
3.2 TCPIPClient
TCP網口連接通訊,需要設置IP,視覺軟件做客戶端
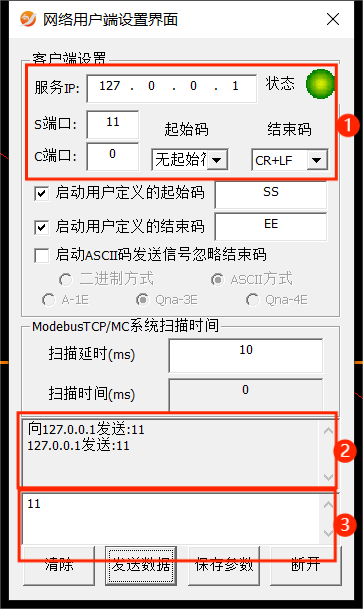
端口參數:②可以看到接收和發送的數據
③是手動發送給服務器的數據
S端口:服務器端口
C端口:本地端口
起始符:通訊數據的開始標示
類型:STX是正文開始
結束符:通訊數據的結束標示
類型:CR是回車
CR+LF是回車+換行
ETX是正文結束
LF是換行
ETX+CR是正文結束+換行
更改IP/端口、數據后需要點擊下面的“保存參數”后再進行操作
3.3 ModbusRTU
Modbus串口通訊
點擊①后打開端口參數②和接收命令③
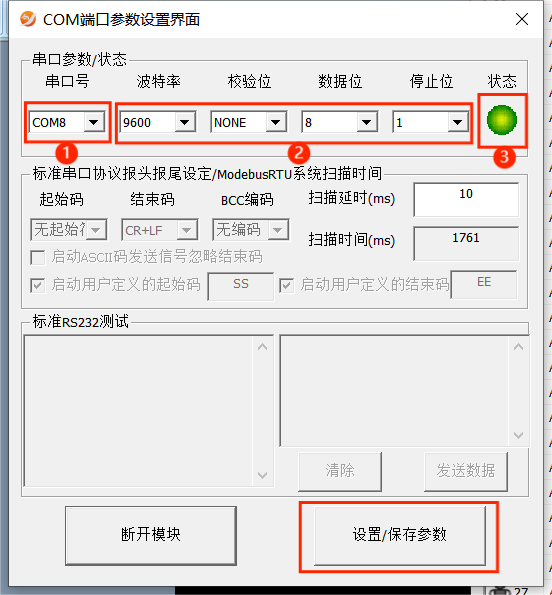
①是串口號,要與PLC串口對上,②的設置要與PLC端口一致,③僅是代表端口是否打開,即使亮綠燈也不代表和PLC連接正常,修改①和②后要點擊右下角“設置/保存參數”保存參數
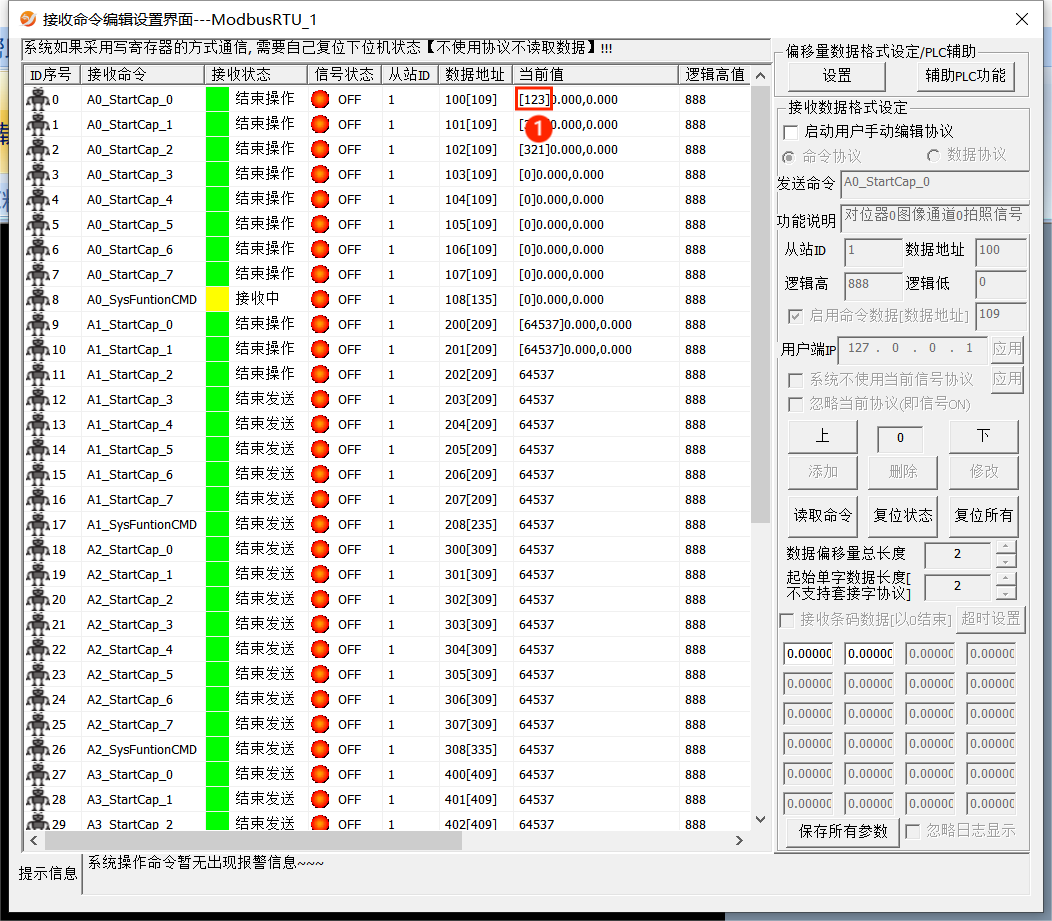
在①中可以看到PLC發送過來的數據
3.4 ModbusTCP
Modbus TCP通訊

點擊①后打開端口參數②和接收命令③
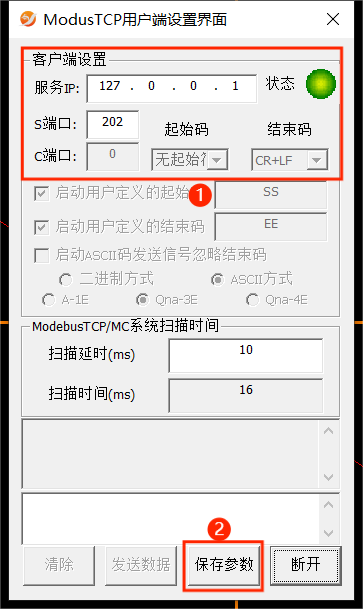
連接通訊
在①里面修改IP和端口號,修改后須在②點擊“保存參數”
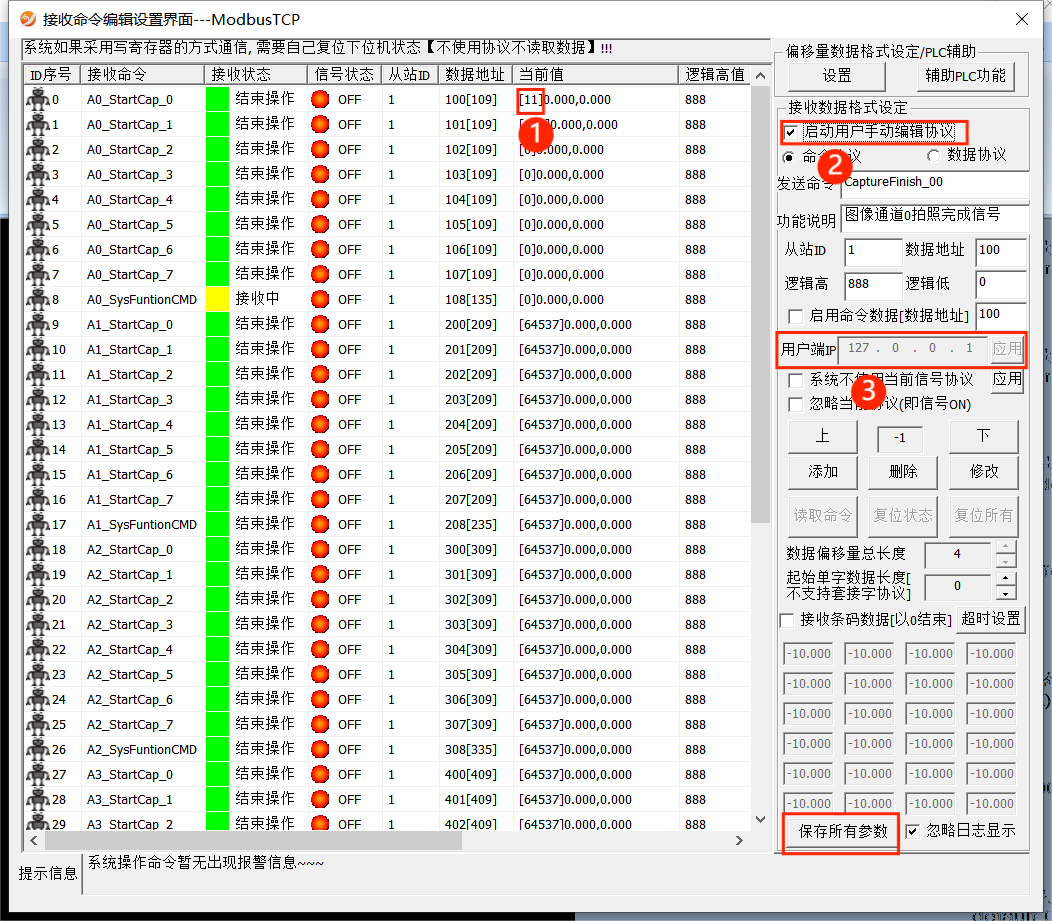
①是PLC發送過來,視覺接收到的數據,點擊②之后才能進行編輯右邊的數據,要保證③IP地址和PLC的地址一樣,修改后點擊下面“保存所有參數”保存,然后點擊②才可以退出
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
