熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A


邊緣匹配,通過計算與模板的輪廓相似度在圖像中尋找目標。
通過鼠標操作 ROI 選定模板,進入【高級參數】設置匹配角度范圍,最小相似度分數,并可修改模板。
通過圖像方法主處理下拉框選擇 邊緣匹配
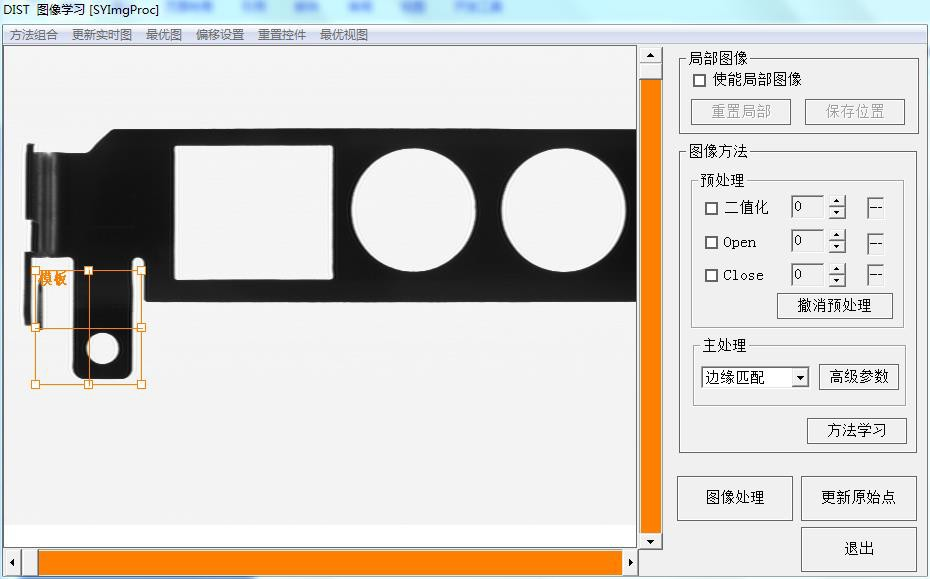
【鼠標操作】通過鼠標改變 ROI 的大小,并拖放至適當的位置作為學習的模板。
【方法學習】保存該方法及模板
點擊高級參數進行高階調整
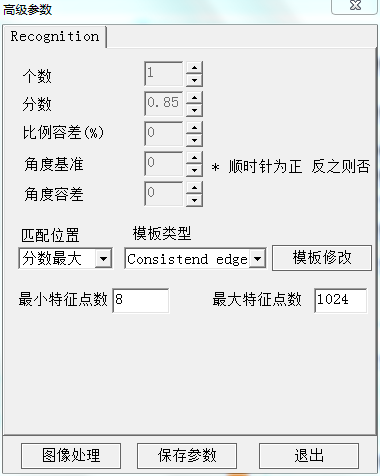
【個數】希望尋找的目標數量
【分數】目標與模板間的相似度分數
【比例容差】目標與模板間的大小比例變化
【角度基準】目標在圖像中的旋轉角度
【角度容差】在<角度基準>基礎上的尋找角度范圍
【匹配位置】分數最大,最左邊的,最右邊的,最上邊的,最下邊的
當圖像中存在多個目標時,可選擇返回其中符合位置的一個。
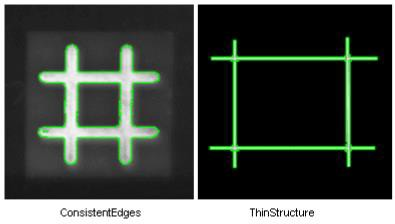
【模板類型】Consistent edge、Thin Structure
Consistent edge:是默認的選項,表示邊緣特征為連續的曲線。大部分情況下使用該參數即可。
Thin Structure:針對特征邊緣比較靠近而容易被認為是同一邊緣曲線的情況,比如兩條靠得很近的平行直線。
【模板修改】彈出模板修改框對模板進行修改
【最小特征點數】模板邊緣的最小特征點數目,表示在金字塔頂層模板保留的邊緣點數。
該數值越大,能提高在頂層初步匹配的準確性。
【最大特征點數】模板邊緣的最大特征點數目,默認為 1024
算法將根據設定的特征點數目,均勻提取模板邊緣上的特征點。
例如模板邊緣點數目為 2000 點,算法將均勻提取 1024 點特征;
若模板邊緣點數目為 700 點,那么算法將提取全部 700 點特征。
對于邊緣模糊的圖像,提高特征點數有利于提高匹配準確度。
說明:
【角度基準】與【角度容差】的關系舉例,假如角度基準設置成 0 度,角度容差設置成 5 度,即算法將在
[-5 +5]度的范圍內
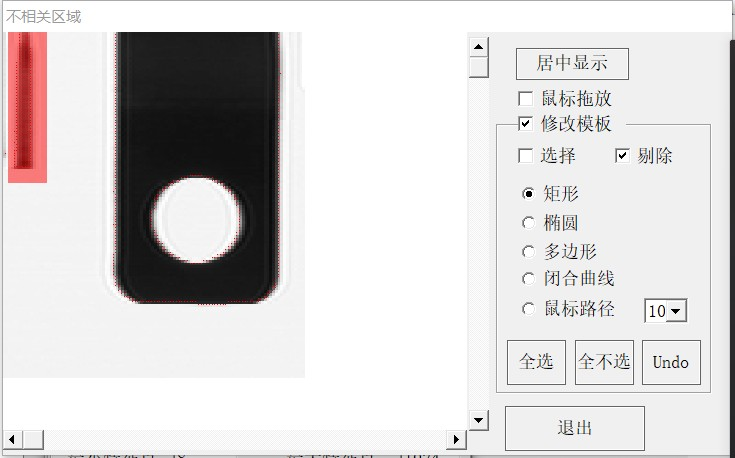
如模板存在干擾的邊緣特征點,可通過鼠標操作進行模板修改。
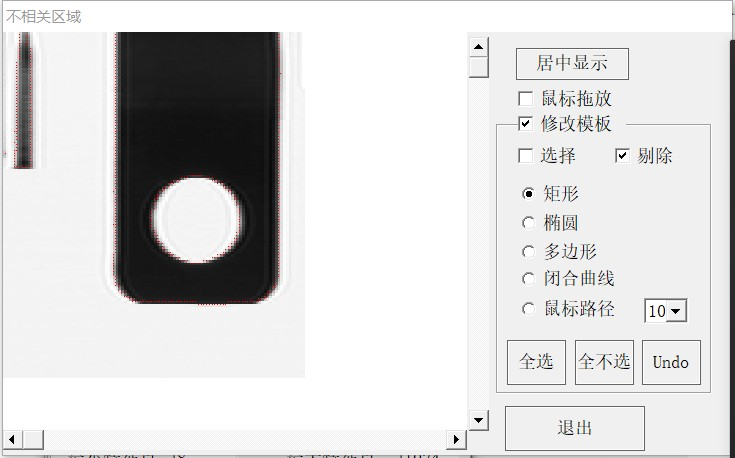
如下圖,算法在提取邊緣特征點時,將不再考慮被涂的紅色區域。
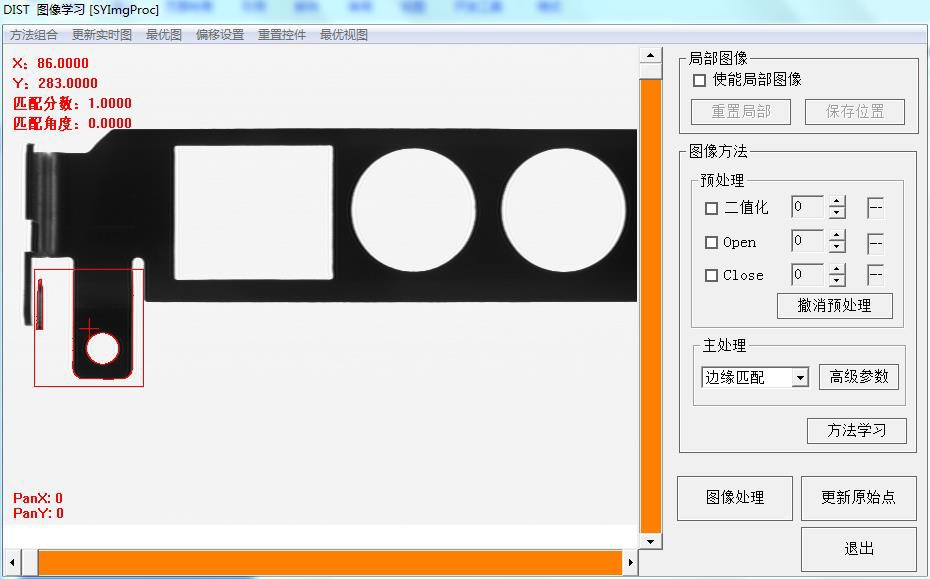
函數取值
執行 SY_IP_ImgProc()進行處理后,返回 ImgProcResult 結構體。其中 X、Y 為目標的坐標,
MatchScore 為匹配分數,MatchAngle 為目標的角度,MatchScale 為目標的縮放比例。
另外,針對匹配多目標的應用,在高級參數設置尋找目標個數后。通過執行 SY_IP_Match_MultiPos()
可實現多目標結果返回。
| list | MatchPosList; |
| list | pMPList; |
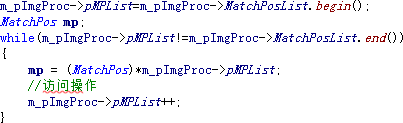
其中 MatchPos 結構體如下:
typedef struct MatchPos
float x;
float y;
float score;
float angle;
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
