熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A


在主界面中選擇“圖像處理”,如下圖所示。

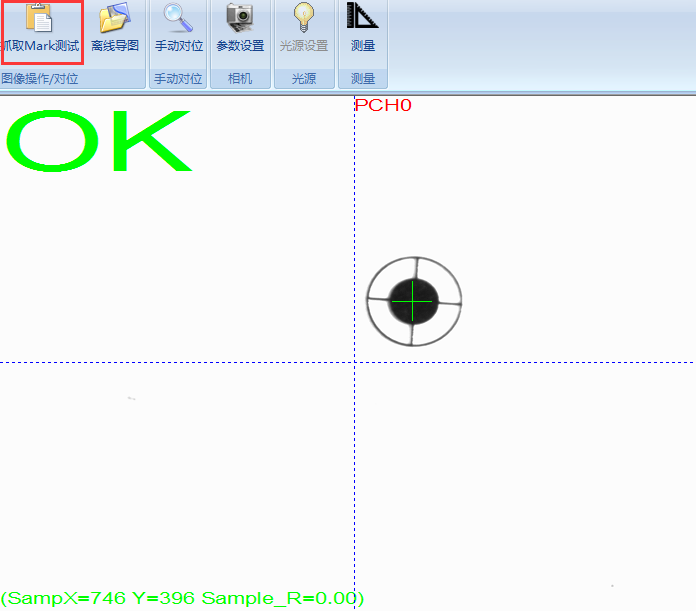
抓取Mark測試
當運用“模板登陸”處理好通道圖像后,單擊“抓取Mark測試”。手動測試是否準確抓取到Mark點。抓取到斑點重心即顯示“OK”,反之則“NG”,如下圖所示。
手動對位
單擊“手動對位”,軟件觸發單次拍照取像自動算法處理實現手動對位。

參數設置
點擊“參數設置”進入系統相機設置界面如下圖,設置相機的相關參數。
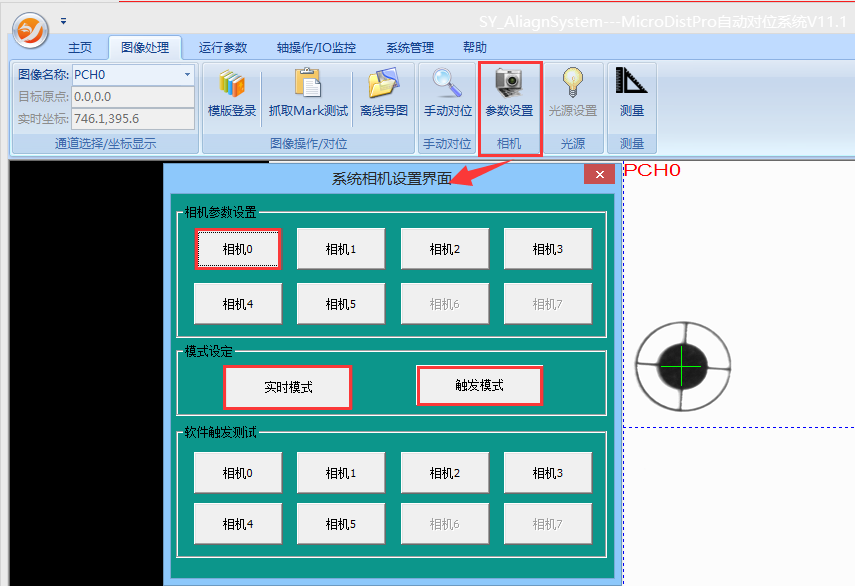
1.進入“相機參數設置”,選擇需要設置的相機序號,彈出如下圖左邊對話框。設置步驟如下:
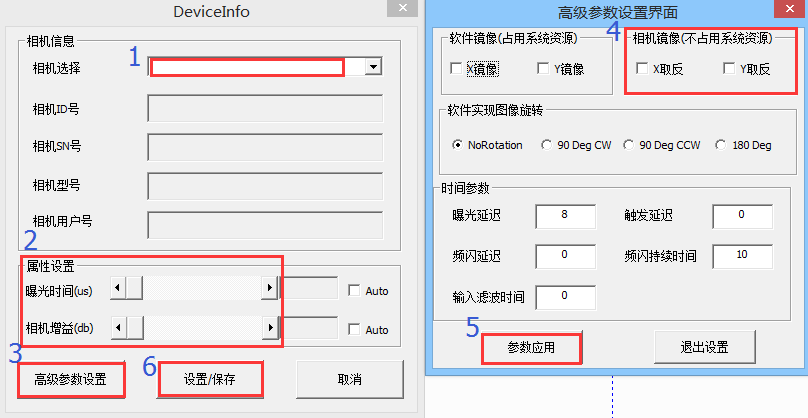
1. 在相機選擇中選擇相機序號;
2. 設置屬性:a.曝光時間: 指從快門打開到關閉的時間間隔,曝光時間越長近光量越多,相應的拍照速度會變慢。
b.相機增益:指相機處理器對光線的敏感程度,感光度越高,對光線的敏感度越強,但圖像的燥點也會越多。
3.高級參數設置:單擊進入高級參數設置界面;
4.相機鏡像:a.得到相機取像的照片經過一系列數學模型算法,將像素左邊鏡像,會占用相應的運行內存。(不推薦使用);
b.相機內部物理鏡像,所以不占用系統運行內存,優先選擇。
光源設置
在主界面中選擇“圖像處理”窗口,點擊“光源設置”進入設置光源模式以及亮度,如下圖所示。

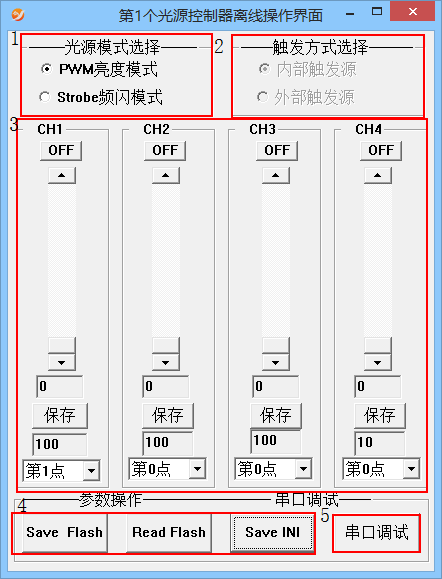
1. 光源模式選擇:PWM亮度模式:控制方式為恒流源控制,各通道最大電流可獨立設置;Strobe頻閃模式:可通過設置觸發延遲時間和頻閃保持時間來控制光源。
2. 觸發方式選擇:內部觸發源;外部觸發源。
3. 光源四通道亮度調節(0~255)。
4. 參數操作:保存亮度、置位亮度、保存設置參數INI。
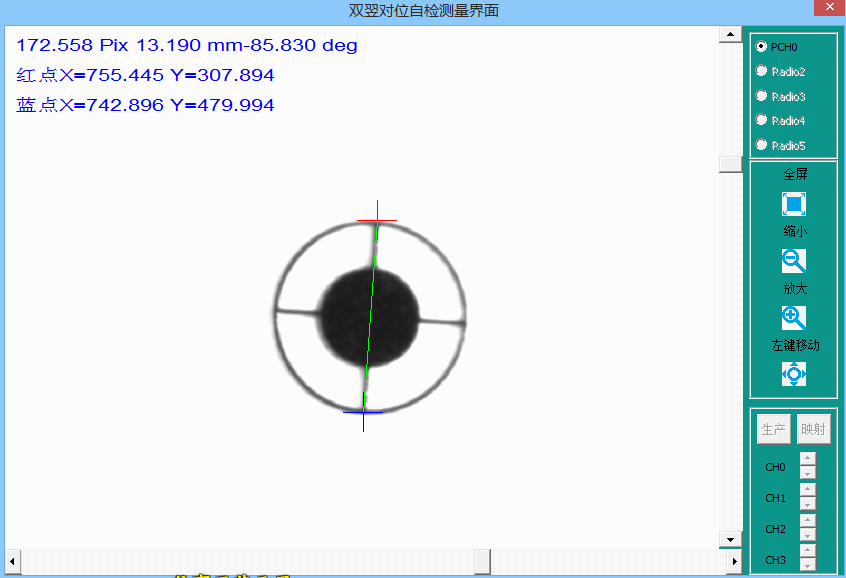
測量
在主界面中點擊“測量”進入如圖自動測量界面。

自動檢測界面中用紅色十字光標、藍色十字光標,移動兩光標與被測對象即可以測出像素值,像素坐標。
在主界面中選擇“運行參數”,如下圖所示。

對位設置
對位設置:點擊進入對位系統設置界面,設置對位相關參數。如下圖所示。
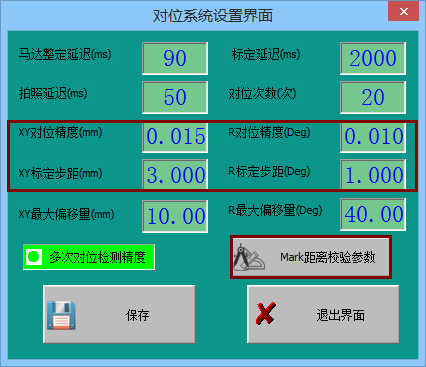
a. 馬達整定延遲:馬達運動到位停止延遲,在給相機拍照信號。
b. 標定延遲:五點標定運動到位等待拍照時間。
c. 拍照延遲:接收到拍照信號延遲拍照。
d. 對位次數:多次進行精對位,對位運動平臺精度越高,對位次數較少,對位越快,精度越高。
e. XY對位精度:精度 = 視野范圍/像素數 (單位mm/pix)
f. R對位精度:旋轉角度的對位精度(單位 deg)。
g. XY標定步距:系統五點標定XY的步距,范圍不可超過運動平臺行程以及相機視野。
h. R標定步距:系統五點標定旋轉R的步距,范圍不可超過運動平臺行程以及相機視野。
i. XY最大偏移量:系統五點標定是XY的步距不可超過該XY最大偏移量。
j. R最大偏移量:系統五點標定是旋轉R的步距不可超過該XY最大偏移量。
k. Mark距離校驗參數:顯示個相機通道的圖像像素數、物理視野的寬高長度以及精度。
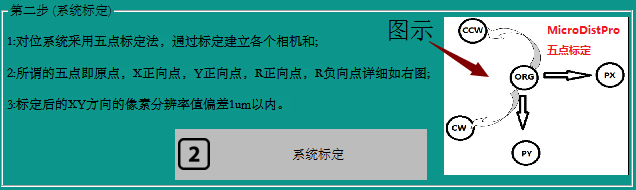
系統標定
1.系統標定說明:
a.含義:在圖像測量過程以及機器視覺應用中,為確定運動平臺的幾何空間位置以及運動狀態量與其在圖像中對應點之間的相互關系,必須建立相機成像的幾何模型,這些幾何模型參數就是系統標定參數
b.意義:標定結果的精度及算法的穩定性直接影響相機與平臺之間工作配合產生結果的準確性。因此,做好系統標定是做好后續工作的前提,提高標定精度是科研工作的重點所在。
C.方法:(如下圖)
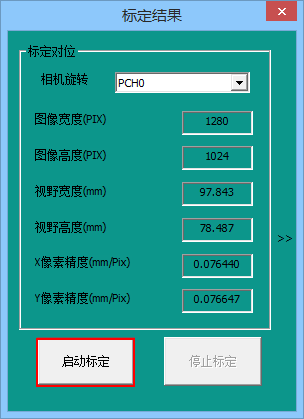
2.進入“系統標定”后彈出如下圖所示。

如下圖,顯示各相機通道的標定信息結果內容。
待系統回零成功,標定參數設置完成后,單擊“啟動標定”即可啟動自動系統標定。系統標定完成之后即自動建立相機與運動平臺的幾何關系、生產配合關系。
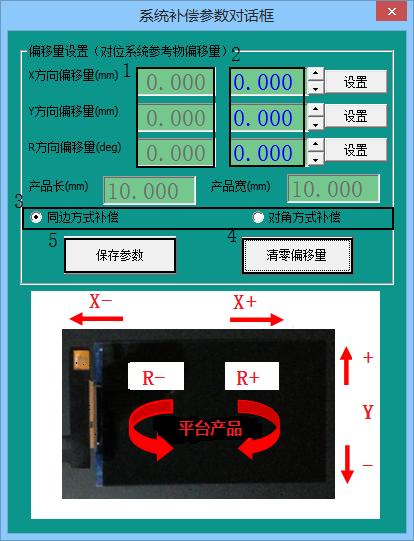
補償
點擊進入“補償”窗口,彈出系統補償參數對話框,如圖所示。
1.X/Y/R方向偏移量的當前系統總補償量。
2. X/Y/R方向偏移量的當前設置量,設置量完成后點擊“設置”即可將設置量置位到系統總補償量。
3.a.同邊方式補償:平行于X/Y方向上的偏移補償方向。
b.對角方式補償:在XY方向各擬為四邊形的相鄰的兩條邊,構建出一個四邊形,補償方向即為平行四邊形的兩條對角線方向。
4.清零偏移量:清除當前設置量以及系統總偏移量。
5.保存參數:設置好偏移量或清零偏移量,點擊保存當前參數設置狀態。
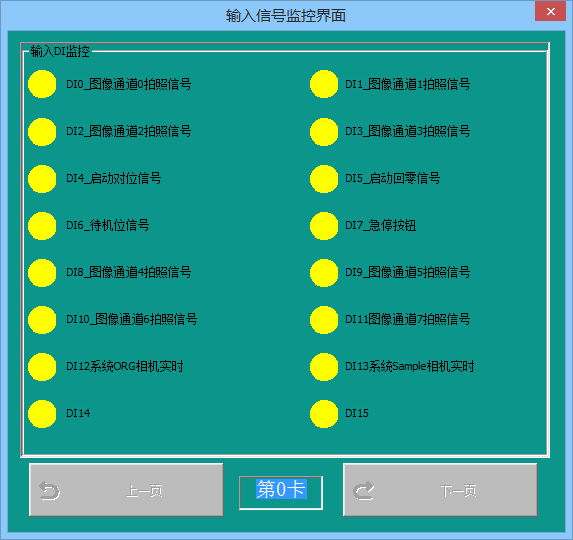
輸入信號
在主界面中選擇“軸操作/IO監控”窗口,點擊“輸入信號”進入輸入信號監控界面,可以實時監控信號的輸入狀態,如下圖所示。
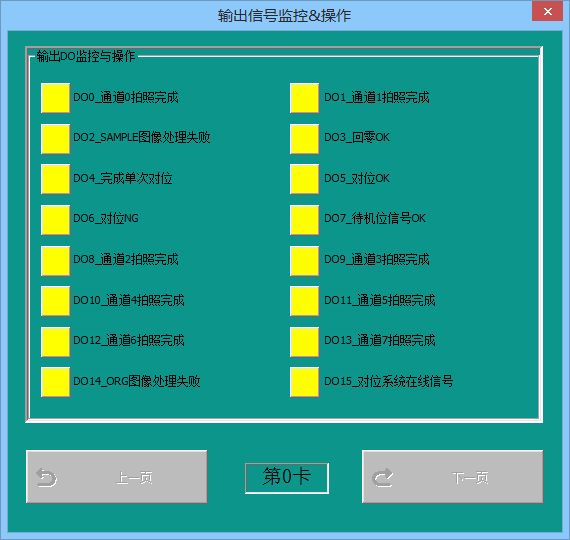
輸出信號
在主界面中選擇“軸操作/IO監控”窗口,點擊“輸出信號”進入輸入信號監控界面,可以實時監控信號的輸出狀態,如下圖所示。
手動操作
在主界面中選擇“軸操作/IO監控”窗口,點擊“手動操作”進入軸手動操作界面,可以手動控制軸的運動以及設置待機位位置坐標,如下圖所示。
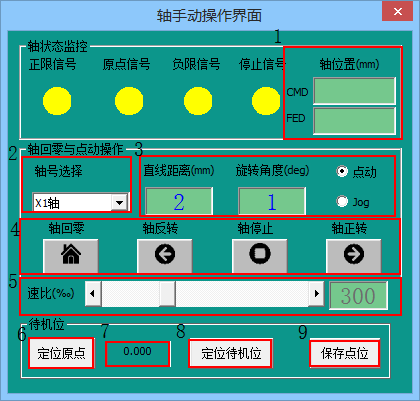
1. 軸位置:CMD :命令指令軸運動的當前位置。
FED:命令指令軸運動由編碼器反饋的軸的當前位置。
2. 軸號選擇:選擇當前的控制的軸號。
3. a.勾選“點動”:控制軸單步運動,運動量為當前設置的“直線距離”
b.勾選“Jog”:控制軸直線運動,直到點擊“軸停止”或到正負限位才停止運動。
4. 控制軸的運動:回零、反轉、停止、正轉。
5. 速比:速度百分比
6. 定為原點:手動單次回到待機位原點。
7. 顯示當前軸的待機位坐標。
8. 定位待機位:置位當前軸設置的待機位坐標。
9. 保存點位:保存所有軸的待機位坐標。
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
