熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A


機器視覺點膠機就是將流體學、過程控制學、機器視覺技術以及計算機圖形學綜合運用在點膠機中,以提高點膠機的自動化、智能化水平。

1 機器視覺點膠機的三大應用
水晶滴膠應用
視覺型的點膠機會自動識別產品,并在系統內生成相應的記憶模型后利用三軸走位系統,將需要點膠的位置進行編程,設定好的程序便會使設備開始自動對產品進行滴膠,有效地解決了不干膠行業的苦惱。
人工智能檢測應用
視覺點膠機可以對產品的不同之處進行視覺判定,所以每個產品在生產過程中的自動化程度得到大大提升,有利于緩解操作人員的作業壓力。當視覺點膠機檢測拍照自動識別到與原設定的物料模型不一致時,系統設置的報警程序將會提示操作人員,從而實現及時篩選出不良品,保證產品的質量。
上色上漆應用
一般視覺點膠機上色上漆與水晶滴膠應用類似,主要是將視覺型點膠機的閥改成滴油、并且考慮到產品形狀不一樣以及顏色種類比較多,視覺點膠機在做油漆的時候需要事先人工把油漆調試好。之后通過視覺點膠機的視覺系統成功實現對產品新裝的識別,進行高速的點油漆上色作業。
2 點膠機運動控制與定位系統
點位運動控制
點膠機的點位控制主要包括上下料部分的執行,膠槍的快速移動和回原點,以及手動微調操作的設置。
在點膠機控制系統中,點位運動主要用于預備、輔助與進出目標點膠物料,為了提高生產效率。
輪廓軌跡控制
輪廓控制是能夠對兩個或兩個以上的運動軸的位移和速度同時進行連續相關控制,使膠槍與工件間的相對運動符合點膠軌跡要求,在工件平面進行各種軌跡的點膠。
由于點膠軌跡的多樣性,需要控制軟件具備編輯軌跡的能力,或者導入相關圖檔,再在此基礎上進行軌跡數據的提取能力。
圖像識別定位
在點膠控制系統中引入圖像,主要目的是為了定位工件,增加設備的柔性,減少甚至無需夾具的使用,少了系統中加入圖像進行點膠后效果檢測。
三種定位方法:
a.1點圖像定位,示教圖像學習一個Mark點模板,工作時候來料搜索該點,計算得到圖像偏差,進而換算成點膠坐標數據來定位工件,該方法只能定位平移,不能得到旋轉偏差。
b.2點圖像定位,識別兩個點,計算得到平移和旋轉偏差。有時候,產品本身會有變形。
c.2點圖像定位,更精確。
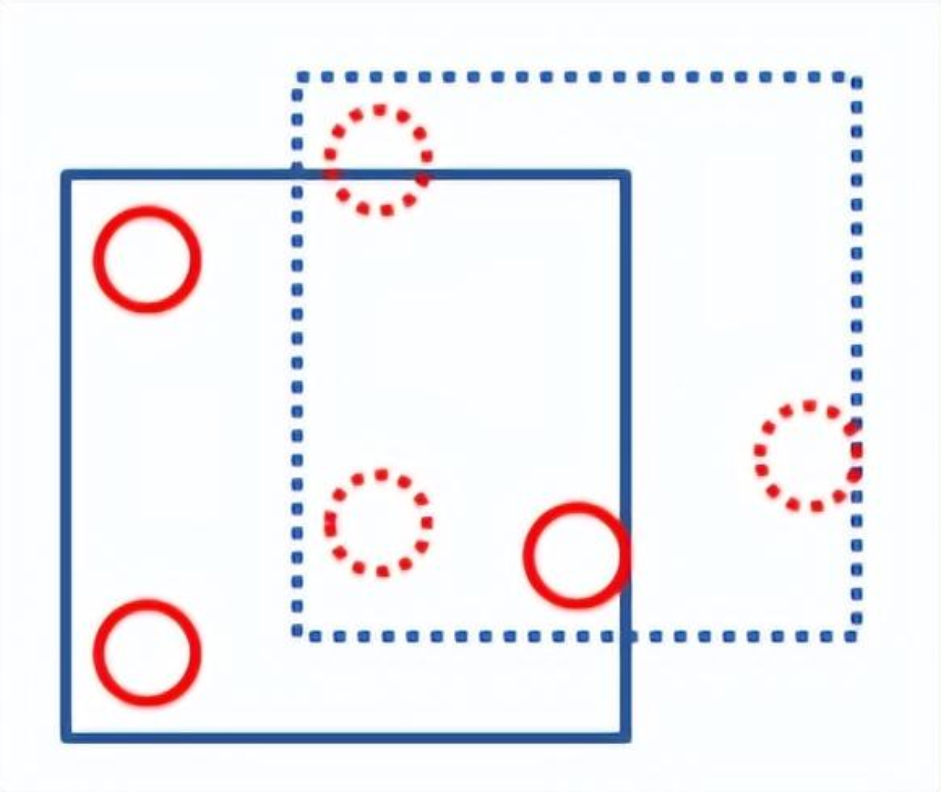
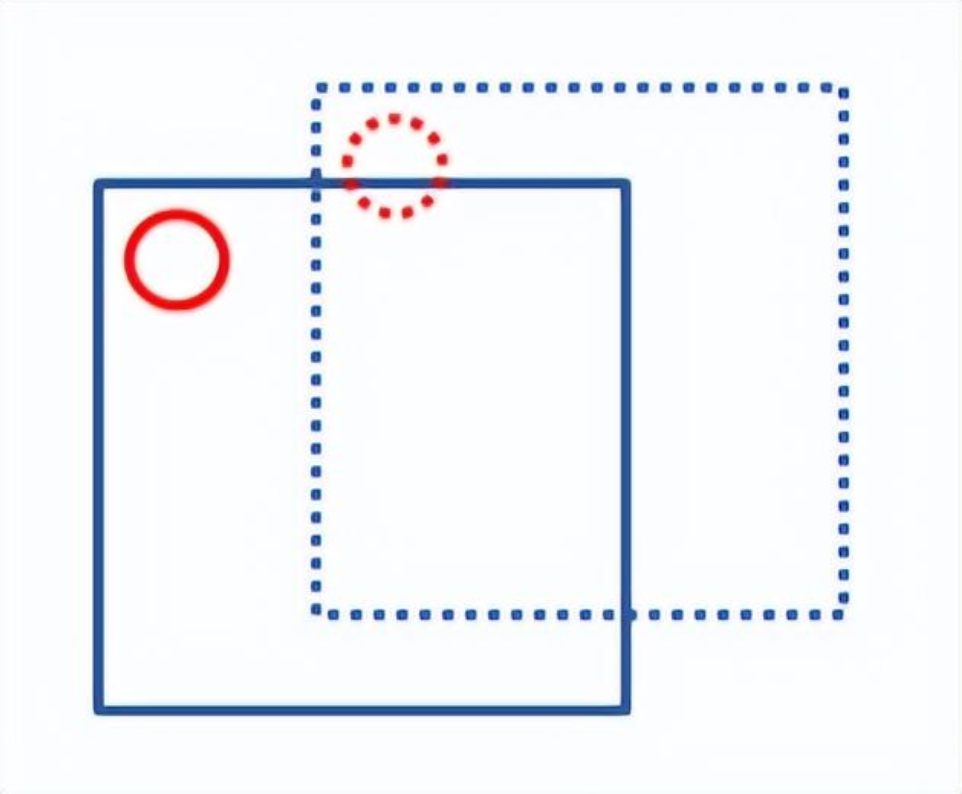
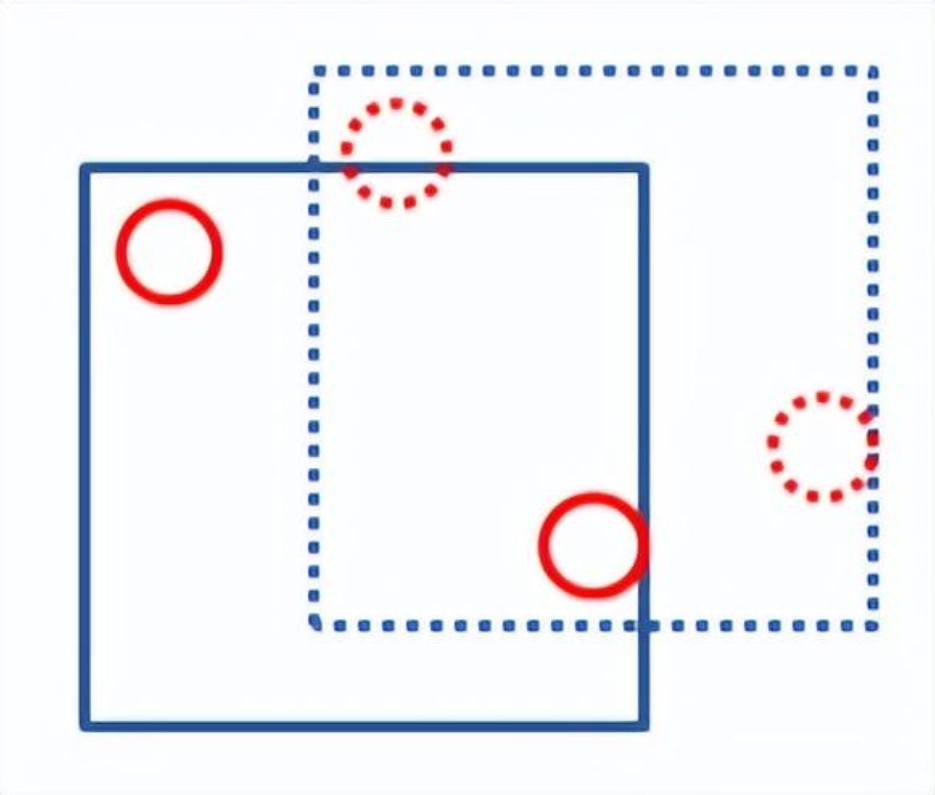
d.粗定位+精定位,如下圖所示
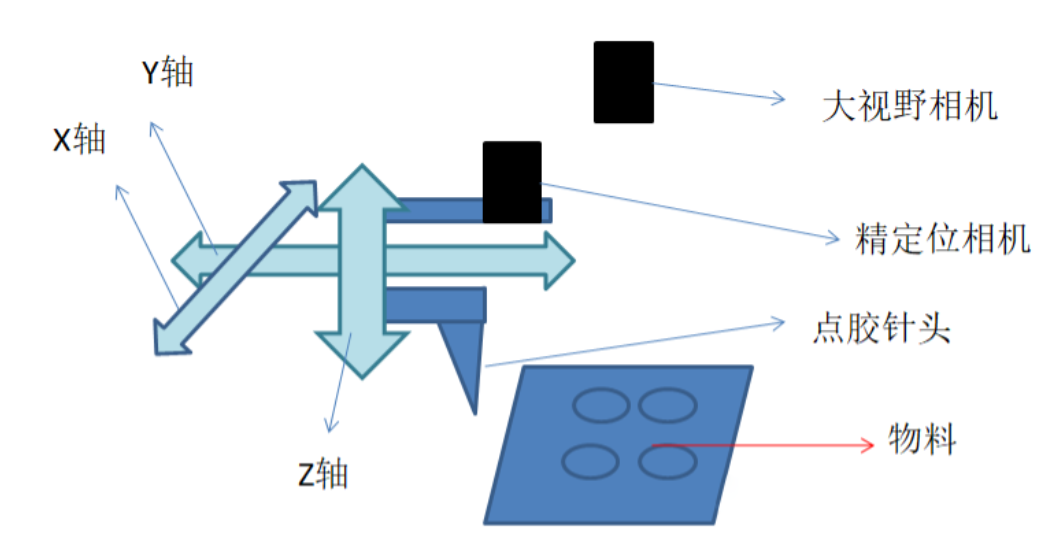
3 視覺點膠應用系統
Mark點位置補償
a.利用視覺算法對位Mark點補償XY方向的誤差;
b.支持單個Mark點、兩個Mark點的掃描方式;
c.支持先全部產品掃Mark再點膠和設定數量產品掃Mark再點膠的模式;
d.可以實現主Mark和子板Mark共用,雙重糾偏的效果。
運動中檢測+ Bad Mark
產品為多組子產品的組合時,需要定位的Mark點數量會比較龐大,采用運動中檢測,可以大大減少抓取時間;在檢測過程中通過Bad Mark標記可以識別出人為標注過的不良產品,不進行點膠,從而提高效率與節省膠水。
實時高度檢測補償
a.利用激光測高補償工件高度不同引起的誤差;
b.支持單點探高,三點探高,逐條指令探高的方式;
c.可以覆蓋不同材質,透明或者非透明產品的應用。
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
