熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A


SIFT的全稱是Scale Invariant Feature Transform,尺度不變特征變換,由加拿大教授David G.Lowe提出的。SIFT特征對旋轉、尺度縮放、亮度變化等保持不變性,是一種非常穩定的局部特征。
1. 圖像的局部特征,對旋轉、尺度縮放、亮度變化保持不變,對視角變化、仿射變換、噪聲也保持一定程度的穩定性。
2. 獨特性好,信息量豐富,適用于海量特征庫進行快速、準確的匹配。
3. 多量性,即使是很少幾個物體也可以產生大量的SIFT特征
4. 高速性,經優化的SIFT匹配算法甚至可以達到實時性
5. 擴招性,可以很方便的與其他的特征向量進行聯合。
有4個主要步驟
1. 尺度空間的極值檢測 搜索所有尺度空間上的圖像,通過高斯微分函數來識別潛在的對尺度和選擇不變的興趣點。
2. 特征點定位 在每個候選的位置上,通過一個擬合精細模型來確定位置尺度,關鍵點的選取依據他們的穩定程度。
3. 特征方向賦值 基于圖像局部的梯度方向,分配給每個關鍵點位置一個或多個方向,后續的所有操作都是對于關鍵點的方向、尺度和位置進行變換,從而提供這些特征的不變性。
4. 特征點描述 在每個特征點周圍的鄰域內,在選定的尺度上測量圖像的局部梯度,這些梯度被變換成一種表示,這種表示允許比較大的局部形狀的變形和光照變換。
在一定的范圍內,無論物體是大還是小,人眼都可以分辨出來。然而計算機要有相同的能力卻不是那么的容易,在未知的場景中,計算機視覺并不能提供物體的尺度大小,其中的一種方法是把物體不同尺度下的圖像都提供給機器,讓機器能夠對物體在不同的尺度下有一個統一的認知。在建立統一認知的過程中,要考慮的就是在圖像在不同的尺度下都存在的特征點。
在早期圖像的多尺度通常使用圖像金字塔表示形式。圖像金字塔是同一圖像在不同的分辨率下得到的一組結果,其生成過程一般包括兩個步驟:
1. 對原始圖像進行平滑
2. 對處理后的圖像進行降采樣(通常是水平、垂直方向的1/2)
降采樣后得到一系列不斷尺寸縮小的圖像。顯然,一個傳統的金字塔中,每一層的圖像是其上一層圖像長、高的各一半。多分辨率的圖像金字塔雖然生成簡單,但其本質是降采樣,圖像的局部特征則難以保持,也就是無法保持特征的尺度不變性。
我們還可以通過圖像的模糊程度來模擬人在距離物體由遠到近時物體在視網膜上成像過程,距離物體越近其尺寸越大圖像也越模糊,這就是高斯尺度空間,使用不同的參數模糊圖像(分辨率不變),是尺度空間的另一種表現形式。
我們知道圖像和高斯函數進行卷積運算能夠對圖像進行模糊,使用不同的“高斯核”可得到不同模糊程度的圖像。一副圖像其高斯尺度空間可由其和不同的高斯卷積得到:
其中,
 稱為尺度空間因子,它是高斯正態分布的標準差,反映了圖像被模糊的程度,其值越大圖像越模糊,對應的尺度也就越大。
稱為尺度空間因子,它是高斯正態分布的標準差,反映了圖像被模糊的程度,其值越大圖像越模糊,對應的尺度也就越大。
使用LoG雖然能較好的檢測到圖像中的特征點,但是其運算量過大,通常可使用**DoG(差分高斯,Difference of Gaussina)**來近似計算LoG[MarrandHidreth]。
設 為相鄰兩個高斯尺度空間的比例因子,則DoG的定義:
為相鄰兩個高斯尺度空間的比例因子,則DoG的定義:

其中,

 表示高斯金字塔的層數,m,n分別是圖像的行和列。減去的系數
表示高斯金字塔的層數,m,n分別是圖像的行和列。減去的系數 可以在
可以在
其中 為所在的組,
為所在的組, 為所在的層,
為所在的層,
相鄰組之間的尺度關系
以一個
1. 金字塔的組數,
2. 構建第0組,將圖像的寬和高都增加一倍,變成
3. 構建第1組,對 降采樣變成
降采樣變成
4.
5. 構建第o組,第s層
高斯金字塔構建成功后,將每一組相鄰的兩層相減就可以得到DoG金字塔.
為了尋找尺度空間的極值點,每個像素點要和其圖像域(同一尺度空間)和尺度域(相鄰的尺度空間)的所有相鄰點進行比較,當其大于(或者小于)所有相鄰點時,改點就是極值點。如圖所示,中間的檢測點要和其所在圖像的
設 ,也就是每組有3層,則
,也就是每組有3層,則 ,也就是有高斯金字塔每組有
,也就是有高斯金字塔每組有

 ,第二組有兩層的尺度分別是
,第二組有兩層的尺度分別是
通過比較檢測得到的DoG的局部極值點實在離散的空間搜索得到的,由于離散空間是對連續空間采樣得到的結果,因此在離散空間找到的極值點不一定是真正意義上的極值點,因此要設法將不滿足條件的點剔除掉。可以通過尺度空間DoG函數進行曲線擬合尋找極值點,這一步的本質是去掉DoG局部曲率非常不對稱的點。
要剔除掉的不符合要求的點主要有兩種:
1. 低對比度的特征點
2. 不穩定的邊緣響應點
候選特征點x,其偏移量定義為
由于x是D(x)的極值點,所以對上式求導并令其為0,得到
然后再把求得的
設對比度的閾值為T,若 ,則該特征點保留,否則剔除掉。
,則該特征點保留,否則剔除掉。
在邊緣梯度的方向上主曲率值比較大,而沿著邊緣方向則主曲率值較小。候選特征點的DoG函數D(x)的主曲率與
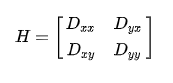
其中,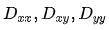 是候選點鄰域對應位置的差分求得的。
是候選點鄰域對應位置的差分求得的。
為了避免求具體的值,可以使用 為H的最大特征值,
為H的最大特征值, 為H的最小特征值,則
為H的最小特征值,則

其中, 為矩陣H的跡,
為矩陣H的跡, 為矩陣H的行列式。
為矩陣H的行列式。
設 表示最大特征值和最小特征值的比值,則
表示最大特征值和最小特征值的比值,則

上式的結果與兩個特征值的比例有關,和具體的大小無關,當兩個特征值想等時其值最小,并且隨著 的增大而增大。因此為了檢測主曲率是否在某個閾值
的增大而增大。因此為了檢測主曲率是否在某個閾值

如果上式成立,則剔除該特征點,否則保留。(Lowe論文中取
經過上面的步驟已經找到了在不同尺度下都存在的特征點,為了實現圖像旋轉不變性,需要給特征點的方向進行賦值。利用特征點鄰域像素的梯度分布特性來確定其方向參數,再利用圖像的梯度直方圖求取關鍵點局部結構的穩定方向。
找到了特征點,也就可以得到該特征點的尺度 ,也就可以得到特征點所在的尺度圖像
,也就可以得到特征點所在的尺度圖像

計算以特征點為中心、以
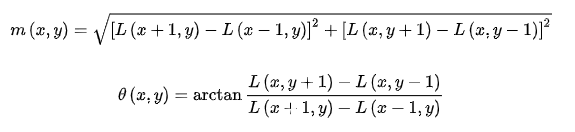
計算得到梯度方向后,就要使用直方圖統計特征點鄰域內像素對應的梯度方向和幅值。梯度方向的直方圖的橫軸是梯度方向的角度(梯度方向的范圍是0到360度,直方圖每36度一個柱共10個柱,或者沒45度一個柱共8個柱),縱軸是梯度方向對應梯度幅值的累加,在直方圖的峰值就是特征點的主方向。在Lowe的論文還提到了使用高斯函數對直方圖進行平滑以增強特征點近的鄰域點對關鍵點方向的作用,并減少突變的影響。為了得到更精確的方向,通常還可以對離散的梯度直方圖進行插值擬合。具體而言,關鍵點的方向可以由和主峰值最近的三個柱值通過拋物線插值得到。在梯度直方圖中,當存在一個相當于主峰值80%能量的柱值時,則可以將這個方向認為是該特征點輔助方向。所以,一個特征點可能檢測到多個方向(也可以理解為,一個特征點可能產生多個坐標、尺度相同,但是方向不同的特征點)。Lowe在論文中指出15%的關鍵點具有多方向,而且這些點對匹配的穩定性很關鍵。
得到特征點的主方向后,對于每個特征點可以得到三個信息
通過以上的步驟已經找到了SIFT特征點位置、尺度和方向信息,下面就需要使用一組向量來描述關鍵點也就是生成特征點描述子,這個描述符不只包含特征點,也含有特征點周圍對其有貢獻的像素點。描述子應具有較高的獨立性,以保證匹配率。
特征描述符的生成大致有三個步驟:
1. 校正旋轉主方向,確保旋轉不變性。
2. 生成描述子,最終形成一個128維的特征向量
3. 歸一化處理,將特征向量長度進行歸一化處理,進一步去除光照的影響。
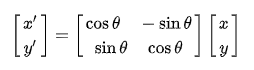
為了保證特征矢量的旋轉不變性,要以特征點為中心,在附近鄰域內將坐標軸旋轉 (特征點的主方向)角度,即將坐標軸旋轉為特征點的主方向。旋轉后鄰域內像素的新坐標為:
(特征點的主方向)角度,即將坐標軸旋轉為特征點的主方向。旋轉后鄰域內像素的新坐標為:
旋轉后以主方向為中心取
對每個關鍵點使用
通過對特征點周圍的像素進行分塊,計算塊內梯度直方圖,生成具有獨特性的向量,這個向量是該區域圖像信息的一種抽象,具有唯一性。
SIFT特征以其對旋轉、尺度縮放、亮度等保持不變性,是一種非常穩定的局部特征,在圖像處理和計算機視覺領域有著很重要的作用,其本身也是非常復雜的,下面對其計算過程做一個粗略總結。
1. DoG尺度空間的極值檢測。 首先是構造DoG尺度空間,在SIFT中使用不同參數的高斯模糊來表示不同的尺度空間。而構造尺度空間是為了檢測在不同尺度下都存在的特征點,特征點的檢測比較常用的方法是
2. 刪除不穩定的極值點。主要刪除兩類:低對比度的極值點以及不穩定的邊緣響應點。
3. ** 確定特征點的主方向**。以特征點的為中心、以
4. 生成特征點的描述子。 首先將坐標軸旋轉為特征點的方向,以特征點為中心的
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈2層2A
