熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區(qū)沙井街道后亭茅洲山工業(yè)園工業(yè)大廈全至科技創(chuàng)新園科創(chuàng)大廈2層2A


基于機器視覺的精密對位系統(tǒng)結(jié)構(gòu)復(fù)雜,集成了精密機械技術(shù)、光學(xué)系統(tǒng)/圖像處理技術(shù)/智能控制技術(shù)等多項技術(shù)。精密機械工作平臺是精密機械技術(shù)的重要組成部分,也是精密對位系統(tǒng)中的關(guān)鍵子系統(tǒng),它對組裝對位設(shè)備完成精確的器件對位起著至關(guān)重要的作用。目前常見的對位運動平臺如下圖所示:
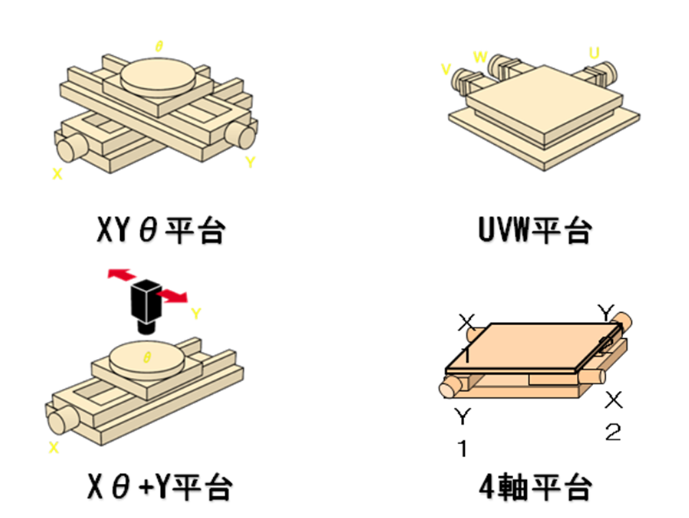
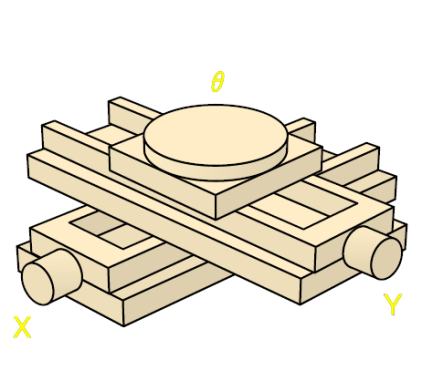
1、 XYθ工作平臺
如上圖所示,XYθ工作平臺是最為常用的工作平臺,θ是獨立的轉(zhuǎn)動軸,可以旋轉(zhuǎn)大角度,缺點是平臺的疊加性造成了誤差的疊加放大,精度不易保證。隨著平板顯示技術(shù)迅猛發(fā)展,平板展示產(chǎn)品對其加工設(shè)備精度的要求也不斷提高,XYθ平臺逐步被精密對位應(yīng)用場合所淘汰。
2、 Xθ+Y工作平臺
所謂Xθ+Y工作平臺就是工件能夠沿X和θ方向運動,Y軸能獨立于X和θ軸自由運動,一般應(yīng)用在玻璃切割,線陣CCD掃描的場合,所以不適合應(yīng)用于精密對位系統(tǒng)中。
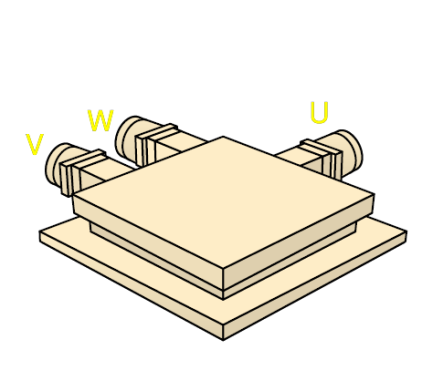
3、 XXY(UVW)工作平臺
日本常用名稱為”UVW”,而臺灣一般稱呼為“XXY”,XXY就是兩個X方向的軸向,搭配一個Y方向軸向,剩余一軸采用自由軸。它的出現(xiàn)用來取代某型傳統(tǒng)的XYθ的應(yīng)用。不同于傳統(tǒng)疊加型的XYθ的結(jié)構(gòu),整體高度有效降低,增加了機臺空間的利用率。
UVW工作平臺是一種新型的用于精密對位系統(tǒng)中的工作平臺,憑借著結(jié)構(gòu)簡單、運動靈活、控制較方便、定位精度高等總舵優(yōu)點,在平板顯示行業(yè)眾多加工設(shè)備中得到了廣泛的應(yīng)用。
4、 XXYY工作平臺
因制程不斷提升,為了能讓超大尺寸的XXY平臺也能精準對位,由上圖可知,XXYY是把XXY中的自由軸也加上馬達,使之稱為可主動帶動運動軸的軸向,故稱作XXYY。
超大平臺的未來趨勢-XXYY簡介
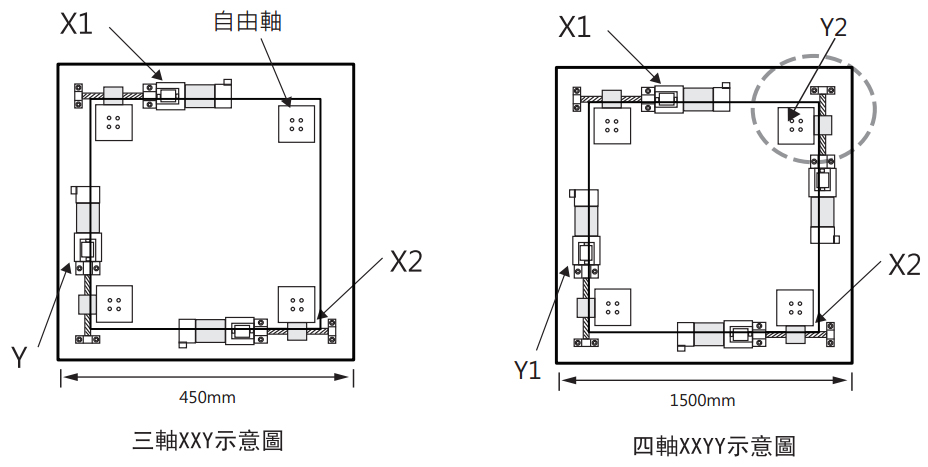
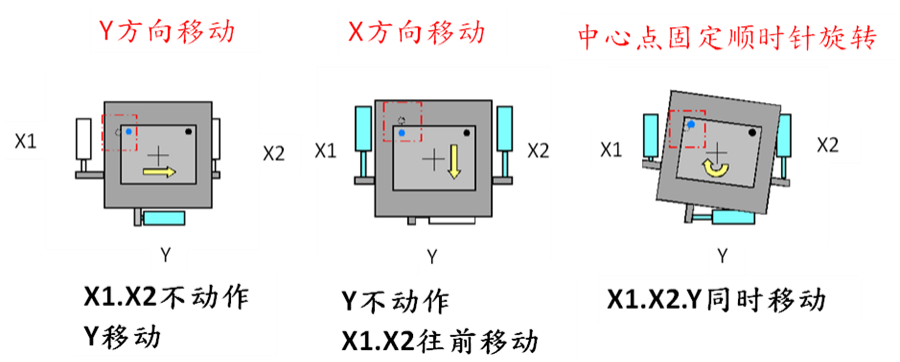
為何要提升至XXYY?當平臺臺面達到1500mm時候,還是使用XXY來做對位的話,會產(chǎn)生什么問題呢?
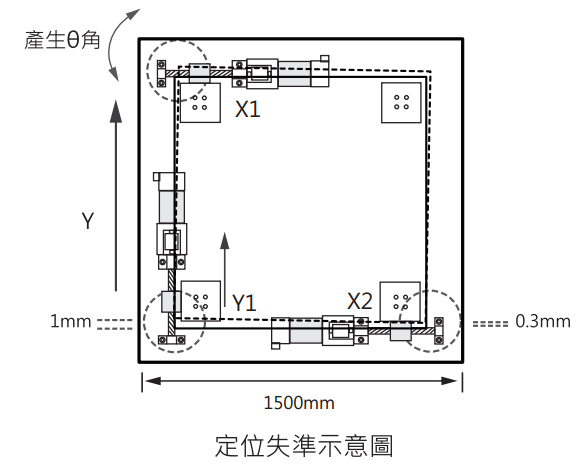
條件1:當X1和X2激磁不動作
條件2:浮立軸預(yù)壓正常,無異常情形
條件3:馬達皆正常動作
情形:
X1和X2不動作進行計策,此時進行Y方向移動,因大臺面的原因,單Y1推動的力量和機構(gòu)間存在的微小間隙,可能會導(dǎo)致整個臺面的移動不正確,產(chǎn)生誤角度出現(xiàn),出現(xiàn)定位失準現(xiàn)象。
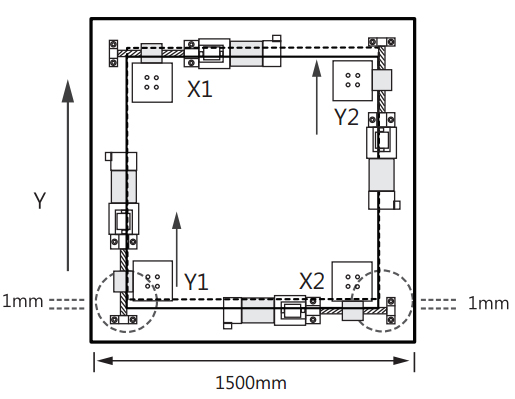
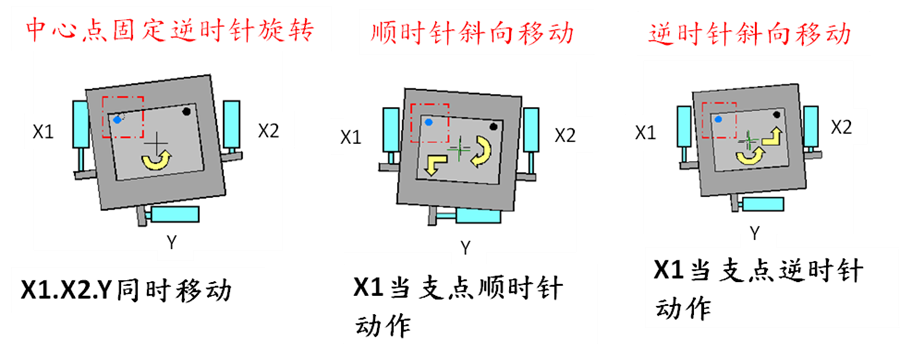
條件1:當X1和X2激磁不動作
條件2:馬達皆正常動作
情形:
X1和X2不動作進行計策,此時進行Y方向移動1mm,因大臺面的原因,Y1和Y2共同進行運動,讓整個臺面正確移動,不產(chǎn)生誤角度,定位準確。
XXYY解決Y方向失準問題,也有本身存在的優(yōu)缺點:
優(yōu)點:
a.相對于三軸,XXYY四軸皆受馬達激磁,排除外力或不定因素造成自由軸移位,可實現(xiàn) 平臺最好的穩(wěn)定狀態(tài)。
b.排除Y方向失準問題,進行準確的移位。
缺點:
a.軟件支援少,目前仍以三軸為主流。
b.進行Y方向運動時是不會產(chǎn)生角度的,Y1和Y2皆是單純的Y方向,在同時動作時, 動作距離如果不精準,再加上模組本身的螺桿和導(dǎo)軌有些間隙問題,在累積兩軸的動作 誤差后,有可能會造成結(jié)構(gòu)上的順壞。
c.成本比三軸來得高。
d.增加Y2軸,也增加軟件的運算難度,在進行角度運算時,連Y2軸也必需考慮進去。
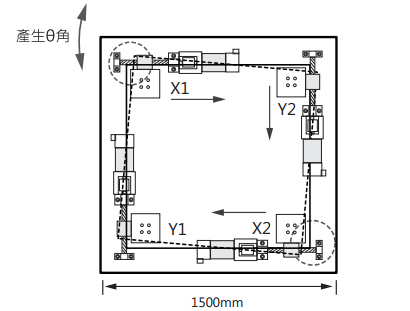
運算角度時,四軸運算的難度提升
名稱 | 新型UVW平臺(EXXY平臺) | 傳統(tǒng)XYθ平臺 |
平臺 |
|
|
定義 | XXY顧名思義就是兩個X方向的軸向,搭配一個Y方向的軸向剩余一軸采用自由軸,所以也有人稱XXY或是日本常用的名稱“UVW” |
由兩個平移平臺和一個旋轉(zhuǎn)平臺組建而成的三維平臺 |
優(yōu)缺點 | (1) 能夠構(gòu)成薄型結(jié)構(gòu)、負載比較強 (2) 容易得高精度 (3) 價格比較昂貴 (4) 構(gòu)造比較復(fù)雜,不容易自己設(shè)計 | (1) 整體厚度比較大 (2) 一般的精度 (3) 價格相對便宜 (4) 構(gòu)造比較簡單,容易設(shè)計 |
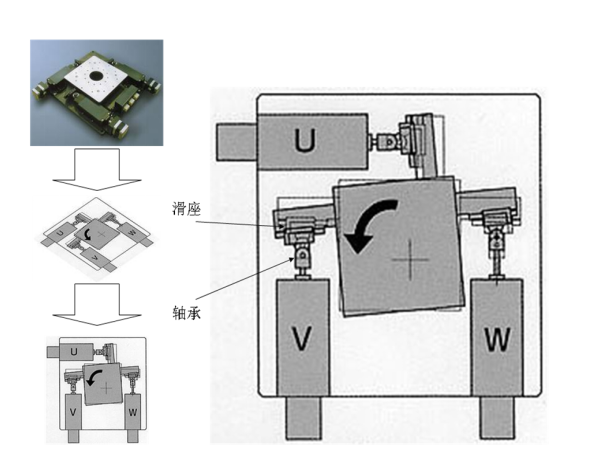
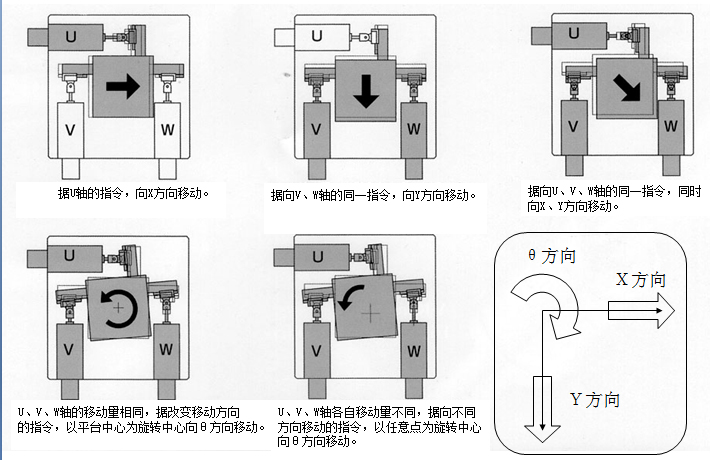
3個伺服電機控制U軸、V軸、W軸3軸, 能夠在任意位置定位的平臺。
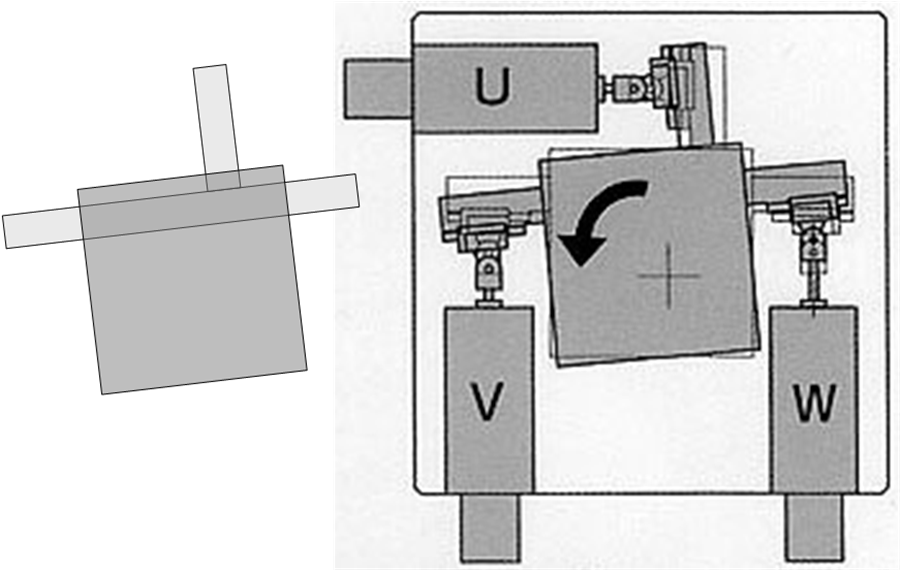
※中央平臺被一個倒T型的支架固定。
UVW(XXY)平臺的特色
? 薄-不同于傳統(tǒng)XYθ的結(jié)構(gòu)少了DD馬達的厚度與成本,整體高度有效降低,進而減輕本身重量,增加機臺空間的利用率。
? 準-平臺經(jīng)由精密研磨加工,每個機構(gòu)環(huán)節(jié)皆經(jīng)過嚴密測試及結(jié)構(gòu)上的調(diào)校。搭配影像對位軟件,整體精度可與客戶討論選擇最適合的條件。
? 穩(wěn)-在每個環(huán)節(jié),包括組成平臺的機件、馬達驅(qū)動器、線軌螺桿等等,皆是經(jīng)過長時間累績經(jīng)驗,反復(fù)修正,用最佳加工方法和高穩(wěn)定度的零組件,達到平臺最穩(wěn)定的狀態(tài)。
動作簡介
要實現(xiàn)微米級的定位要求有許多不同的方式,采用直線電機和氣浮導(dǎo)軌可以消除摩擦影像,行程長,但是成本很高,體積大,適用場合受到限制;采用壓電元件驅(qū)動,以柔性鉸鏈為彈性導(dǎo)軌克服了機械摩擦等因素,可以獲得納米級的定位精度,但壓電元件的變形有限,一般運動范圍在十幾微米。傳統(tǒng)的采用伺服電機和精密絲杠傳動的方案,盡管存在機械間隙、摩擦力以及爬行現(xiàn)象,但是這些缺陷在一定程度上能予以克服,同時絲杠螺母機構(gòu)可以做到微米級以下精度,經(jīng)濟成本不高。
平臺數(shù)學(xué)模型
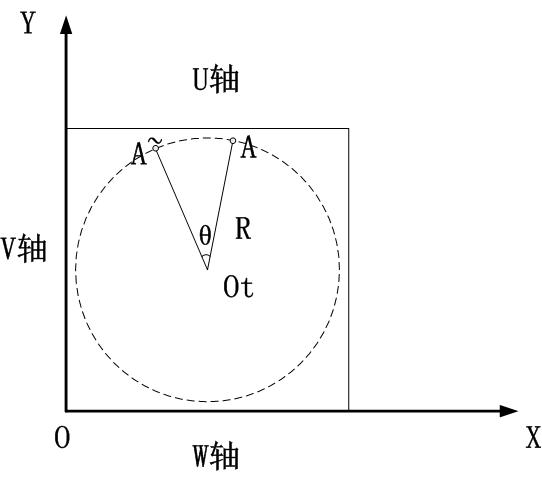
如果是UVW平臺,設(shè)U軸到平臺中心Ot的距離為UR,伺服電機可以的分辨率為10000個脈沖一圈,絲杠的導(dǎo)程Pitch為5mm,那這樣U軸的最小位移量Umin可以達到0.5um;將設(shè)當UR=100mm時平臺可以旋轉(zhuǎn)的細分角度可以達到arctan(0.0005/100)。具體計算如下:
Umin = 5mm/10000Pulse =0.0005mm/Pulse
tan(θmin)=0.0005/100 θmin =arctan(0.0005/100)≈0.0003度
而如果使用XYθ類型的平臺機構(gòu),則旋轉(zhuǎn)的細分角度θmin就是電機自身能旋轉(zhuǎn)的最小角度,當伺服電機的分辨率為10000pulse/Rev時,它的細分角度最小為(2π/10000) = 0.036度。從理論上分析,UVW平臺的角度細分精度遠遠大于XYθ類型的平臺機構(gòu)。
通過以上分析對平臺機構(gòu)的分析和計算,UVW平臺在許多方面要優(yōu)于其他的平臺。
(1)直驅(qū)型
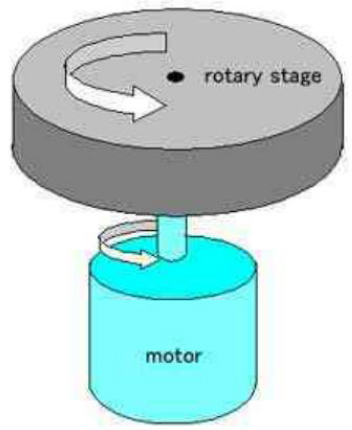
直驅(qū)型由于采用馬達直接驅(qū)動旋轉(zhuǎn)平臺,所以旋轉(zhuǎn)角度和馬達的分辨率有關(guān):
假如:
我們采用的電機驅(qū)動器分辨率為:10000P/R即電機旋轉(zhuǎn)1圈需要10000個脈沖,而傳動比為90:1,即電機轉(zhuǎn)動90圈,平臺才轉(zhuǎn)動1圈,即旋轉(zhuǎn)平臺轉(zhuǎn)動1圈需要90*10000 = 900000個脈沖,那么對于旋轉(zhuǎn)平臺來說,每個脈沖移動的角度為2π/900000.
若是電機不加減速機,直接通過電機軸和聯(lián)軸器連接旋轉(zhuǎn)平臺,那么傳動比則為1:1,即電機轉(zhuǎn)動1圈,旋轉(zhuǎn)平臺即轉(zhuǎn)動1圈,如上例所示,則旋轉(zhuǎn)平臺每個脈沖移動的角度為2π/10000。
(2)直線驅(qū)動型
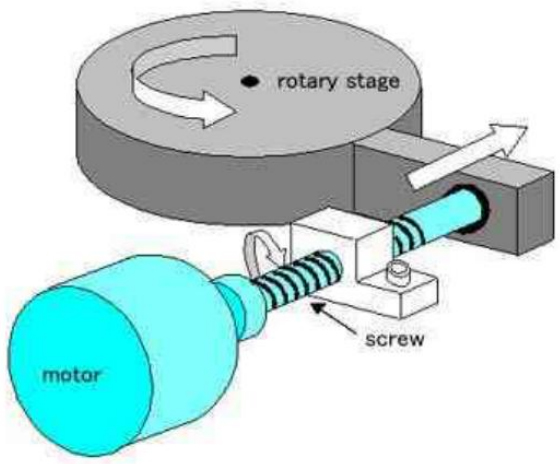
直線驅(qū)動型旋轉(zhuǎn)平臺
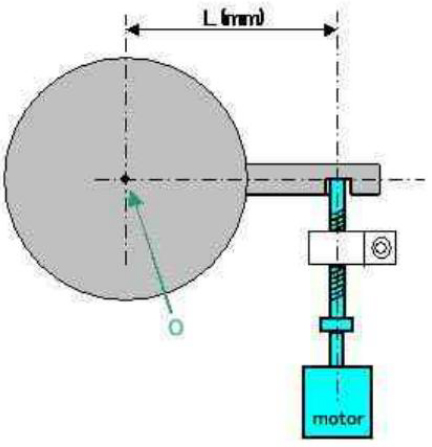
直線驅(qū)動型為采用絲桿帶動連桿,使平臺進行旋轉(zhuǎn)運動。
根據(jù)數(shù)學(xué)公式:
角度(θ)=弧長(L)/半徑(R)即可算出這種類型的分辨率
假設(shè)旋轉(zhuǎn)軸電機可以的分辨率為10000個脈沖一圈,絲杠的導(dǎo)程Pitch為5mm,那這樣旋轉(zhuǎn)軸的最小位移量Umin可以達到0.5um;將旋轉(zhuǎn)半徑R(即上圖中的L):R=100mm時平臺可以旋轉(zhuǎn)的細分角度可以達到arctan(0.0005/100)。具體計算如下:
Umin = 5mm/10000Pulse =0.0005mm/Pulse
tan(θmin)=0.0005/100 θmin =arctan(0.0005/100)≈0.0003度
此時,這個電機每一個脈沖,旋轉(zhuǎn)平臺轉(zhuǎn)動0.0003度。
對位系統(tǒng)包的基本概念 (1)
對位系統(tǒng)包是指,使用2~4顆相機針對目標物(Mark點)的位置,2~4顆相機采集Mark點的信息,算出XYθ移動量。
具有自動調(diào)整功能,相機安裝時,不需要很麻煩地吻合X、Y坐標以及進行相機->平臺坐標轉(zhuǎn)換的復(fù)雜運算。若是檢測Mark點變化后,只需執(zhí)行自動調(diào)整,就可以簡單恢復(fù)到模板的位置,從而保證對位精度。若是產(chǎn)品變換,導(dǎo)致Mark點變換后,只需要重新對新的Mark點進行模板學(xué)習(xí),即可完成對位操作。使得產(chǎn)品品種變更后實現(xiàn)自動對位也變得十分簡單。
對位系統(tǒng)包的基本概念(2)
自標定(Auto Calibration)
如果利用對位控制器,此前使用圖像處理裝置時不可或缺的校正工序能夠自動完成。
(1)自動算出各攝像頭的分辨率、視野大小
(2)自動算出相機與平臺的角度
(3)自動測得兩相機之間的關(guān)系,統(tǒng)一大坐標系。
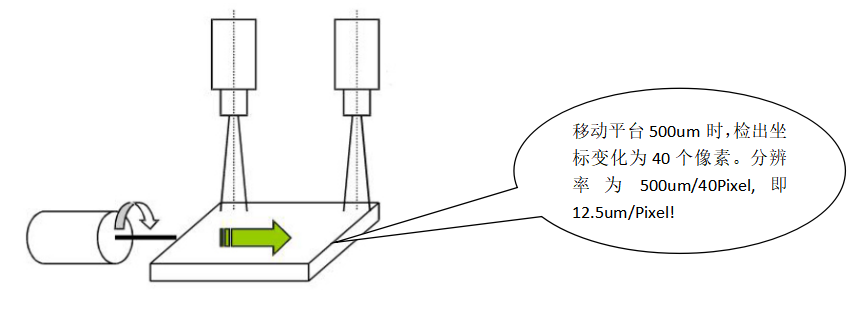
通過移動分別X、Y、θ軸,自動算出相機的分辨率、視野大小,以及對平臺進行自標定。
對位系統(tǒng)包的基本概念(3)
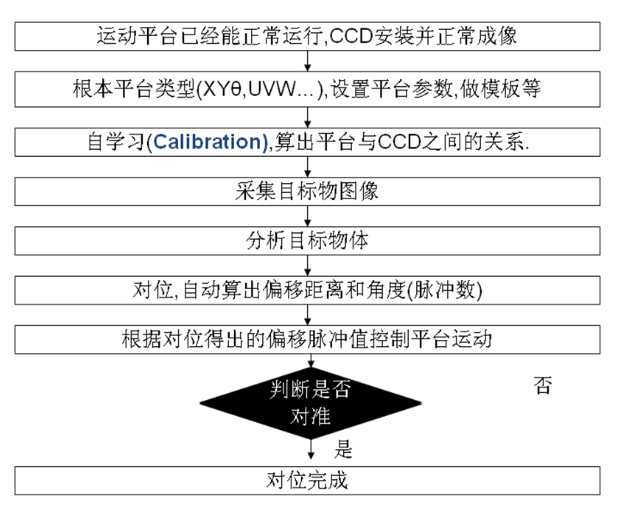
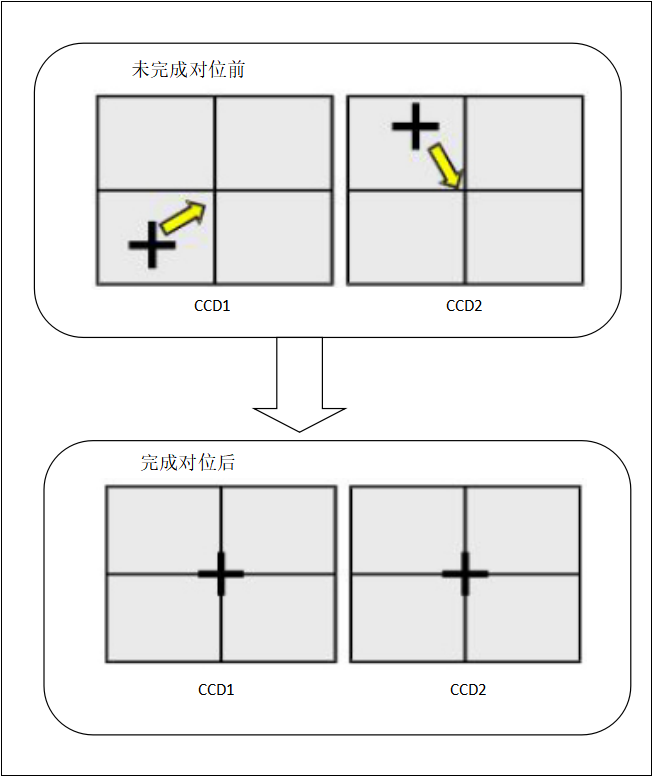
自動對位
根據(jù)之前的自標定,算出相對于基準位置的對象物mark的坐標即移動Mark的偏移量。然后移動X、Y、θ進行對位。最終完成對位。若是一次沒有將當前mark點移動回和基準位置的mark一樣的位置,那么可以進行重復(fù)操作直到完成對位。
XYθ視覺對位平臺的系統(tǒng)原理
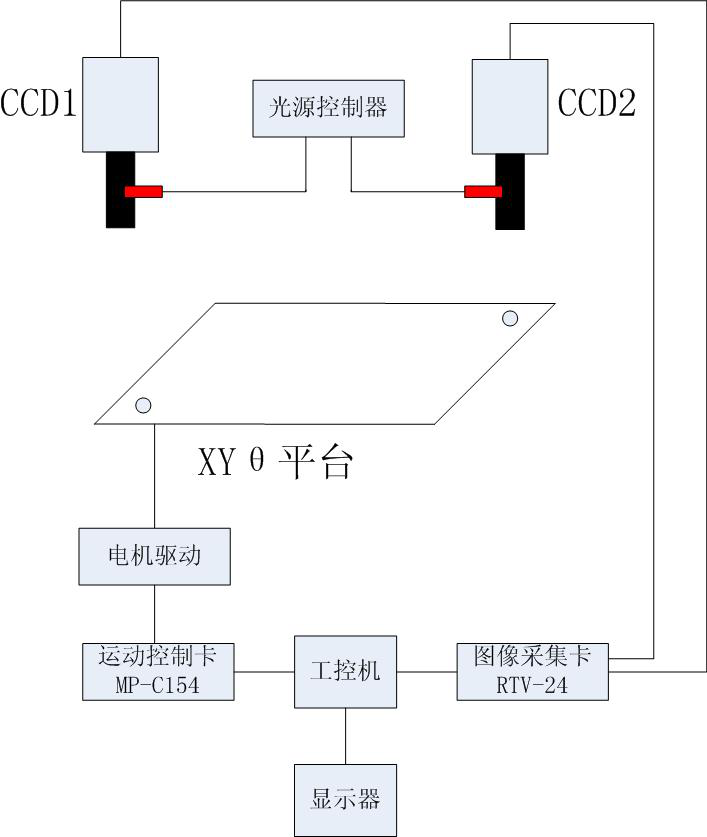
XYθ視覺對位平臺的系統(tǒng)原理圖
在本系統(tǒng)中,采用雙CCD進行待測物靶標的讀取,通過圖像處理系統(tǒng)與基準靶標進行比較,運用圖形識別算法計算平臺移動量,通過工控機和運動控制卡控制電機執(zhí)行運動,達到薄膜上的靶標與基準靶標的對準,進而完成對位調(diào)整。
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區(qū)沙井街道后亭茅洲山工業(yè)園工業(yè)大廈全至科技創(chuàng)新園科創(chuàng)大廈2層2A
