熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區(qū)沙井街道后亭茅洲山工業(yè)園工業(yè)大廈全至科技創(chuàng)新園科創(chuàng)大廈2層2A


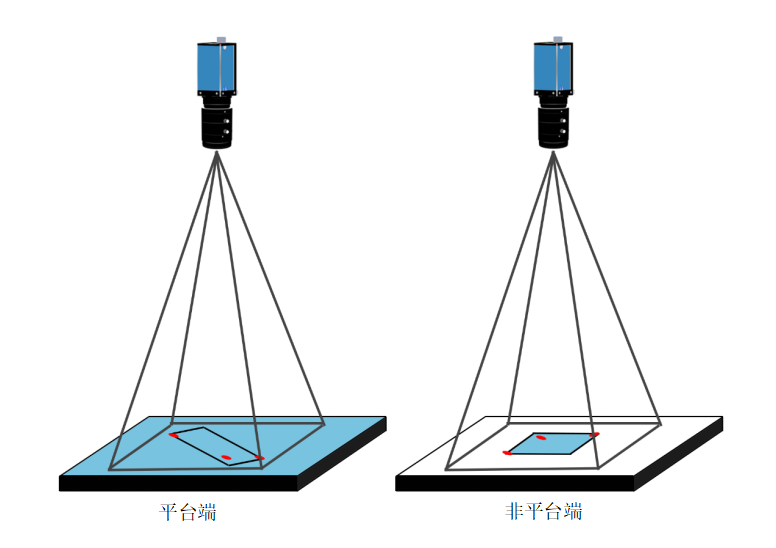
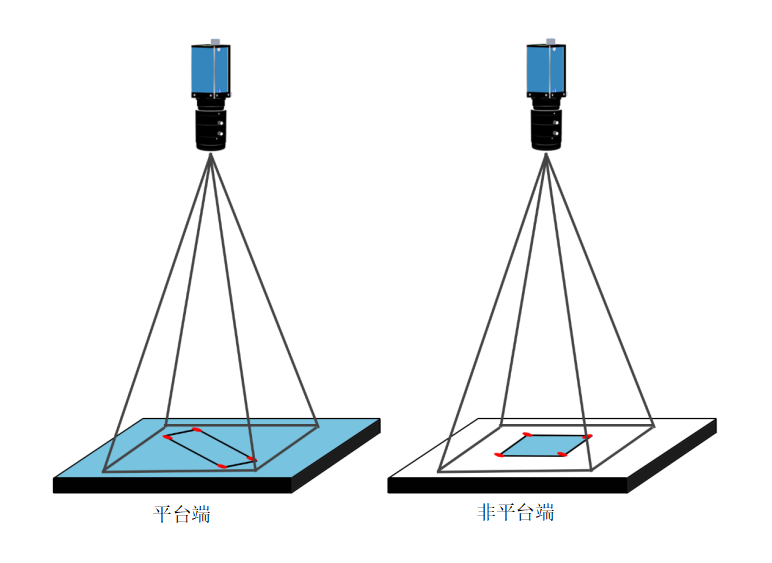
對位目標不固定,通過非對位平臺上的目標相機獲取坐標,通過映射關系轉換到平臺上相機中,再計算出對象和目標位置偏差,使對準目標位置。
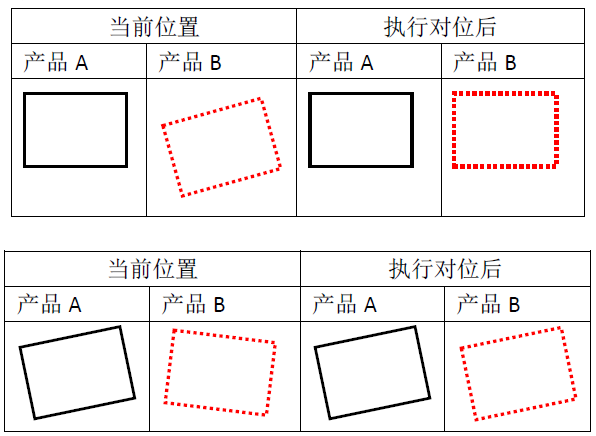
說明:平臺端和非平臺端來料位置都不固定,但是Mark與產(chǎn)品的相對位置固定。平臺端和非平臺端各有一個相機,拍照并找兩張照片中Mark的角度坐標差作為偏移量,根據(jù)偏移量和兩相機之間的映射關系,將平臺端的產(chǎn)品貼到非平臺端上。
應用場景:小尺寸產(chǎn)品或精度要求不高的產(chǎn)品
適用產(chǎn)品:如fpc與鋼片的貼合
適用尺寸:小尺寸
精度:±0.05mm
該模型下常見的Mark標志方法如下(同單目雙Mark自對位):
說明:平臺端和非平臺端來料位置都不固定,但是Mark與產(chǎn)品的相對位置固定。確保兩個Mark都在相機視野內(通常是將產(chǎn)品抓起后再拍攝防止拍完再抓導致產(chǎn)品移動或變形)。根據(jù)糾偏算法找到偏移量。根據(jù)偏移量和兩端相機的映射關系將平臺端的產(chǎn)品貼到非平臺端上。
糾偏方法:如上圖所示,糾偏方法同單目雙Mark自對位,區(qū)別在于單目雙Mark自對位是將平臺端產(chǎn)品貼合到基準位,單目四Mark映射對位模型是將平臺端產(chǎn)品貼合到非平臺端,兩端的產(chǎn)品都需要做定位。
應用場景:相同環(huán)境下單目四Mark映射對位比單目雙Mark映射對位精度高
適用尺寸:小尺寸
精度:通常±0.05mm
該模型下常見的Mark標志方法如下(同單目三Mark自對位):
說明:平臺端與非平臺端的產(chǎn)品來料位置不固定,但是Mark與產(chǎn)品的相對位置固定。三個Mark對應產(chǎn)品的兩個交點和一個特征點。拍攝時確保所有Mark點在相機視野內(通常是將產(chǎn)品抓起后再拍攝防止拍完再抓導致產(chǎn)品移動或變形)。根據(jù)糾偏算法找到偏移量,根據(jù)偏移量將平臺端的產(chǎn)品貼到非平臺端上。
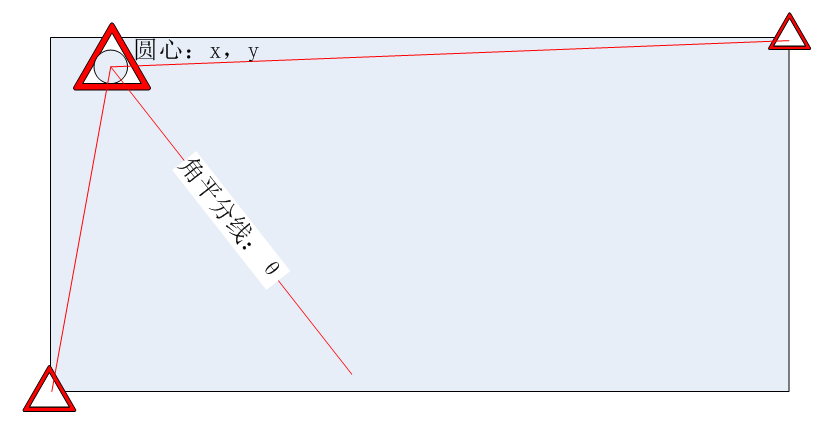
糾偏方法:如上圖所示,糾偏方法同單目三Mark自對位,區(qū)別在于單目三Mark自對位是將平臺端產(chǎn)品貼合到基準位,單目六Mark映射對位模型是將平臺端產(chǎn)品貼合到非平臺端,兩端的產(chǎn)品都需要做定位。
應用場景:該模型并不常用,屬于比較特殊的應用模型,但是相同環(huán)境下精度比單目單/雙Mark更高
適用產(chǎn)品:客戶要求使用這種定位方式時
適用尺寸:小尺寸
精度:±0.05mm
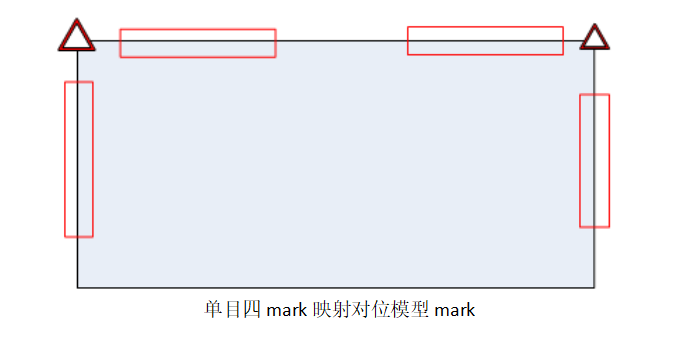
該模型下常見的Mark標志方法如下(同單目四Mark自對位):
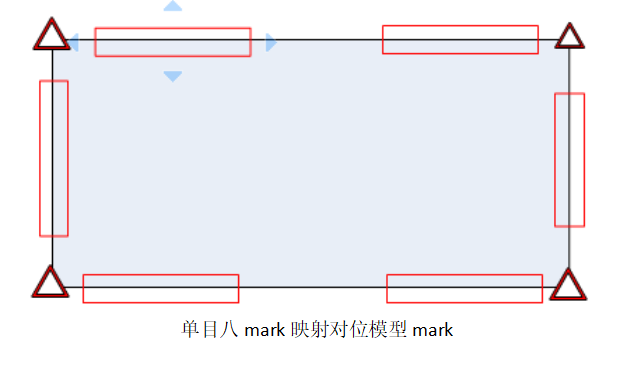
說明:平臺端和非平臺端來料位置都不固定,但Mark與產(chǎn)品的相對位置固定。四個Mark對應矩形產(chǎn)品的四個角點。拍攝時確保四個Mark都在相機視野內(通常是將產(chǎn)品抓起后再拍攝防止拍完再抓導致產(chǎn)品移動或變形)。根據(jù)糾偏算法找到偏移量。根據(jù)偏移量和兩端相機的映射關系將平臺端的產(chǎn)品貼到非平臺端上。
糾偏方法:如上圖所示,糾偏方法同單目四Mark自對位,區(qū)別在于單目四Mark自對位是將平臺端產(chǎn)品貼合到基準位,單目八Mark映射對位模型是將平臺端產(chǎn)品貼合到非平臺端,兩端的產(chǎn)品都需要做定位。
應用場景:增加了抓取Mark通道,使得對位精度更高,對產(chǎn)品的居中效果更加明顯
適用產(chǎn)品:客戶要求精度較高時
適用尺寸:800x600mm(完成項目)
精度:±0.05mm
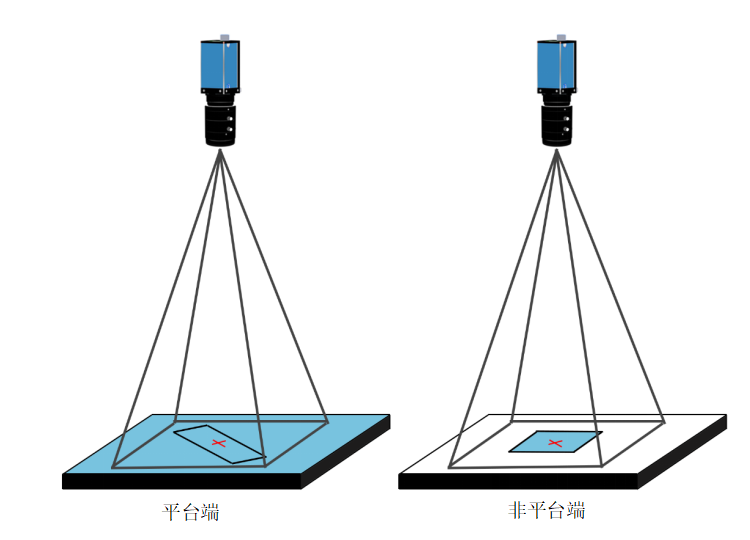
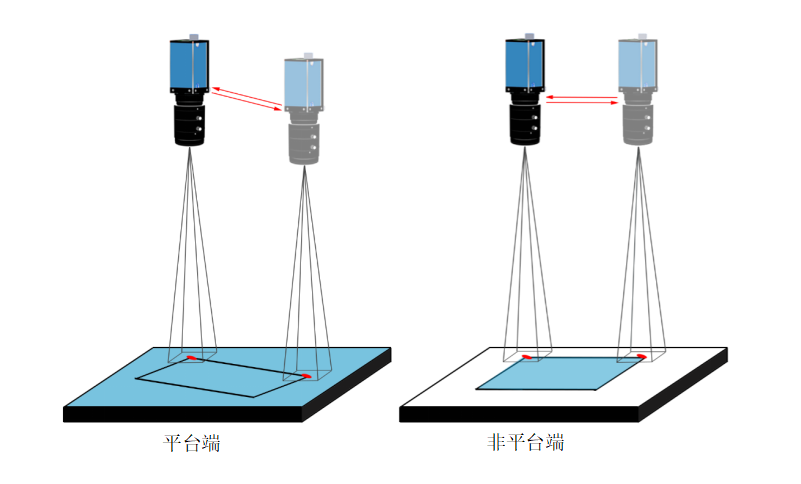
四mark映射對位模型(1)---單相機模型,如下圖:
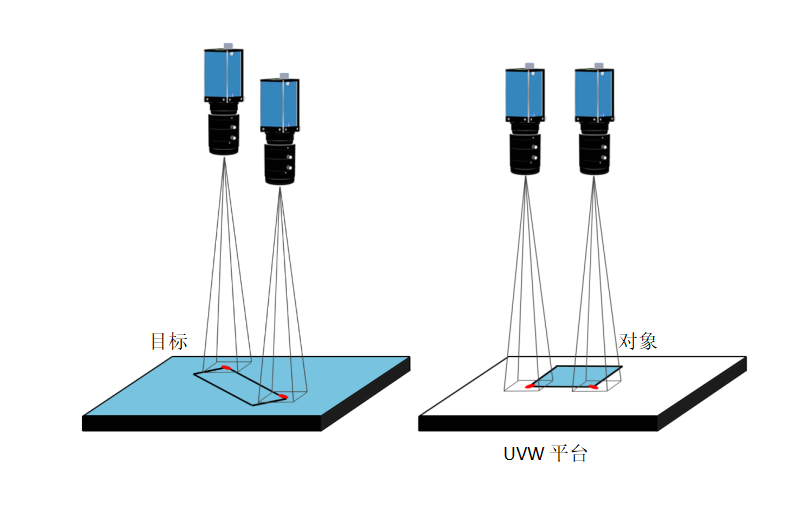
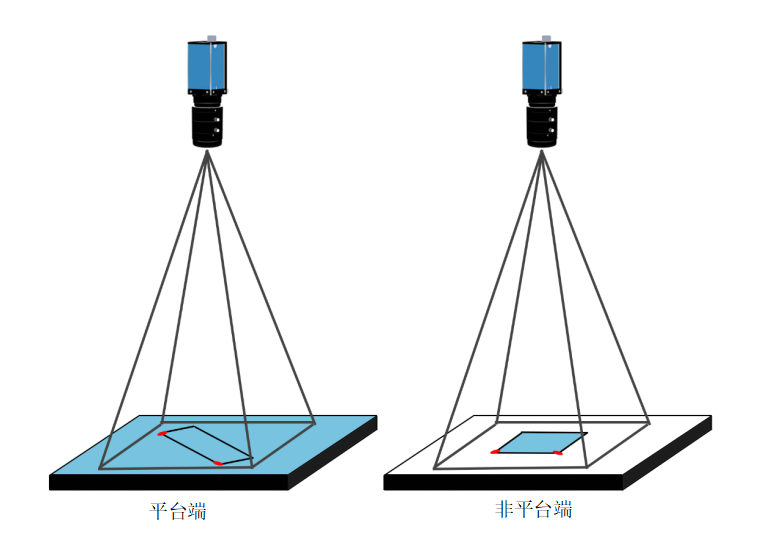
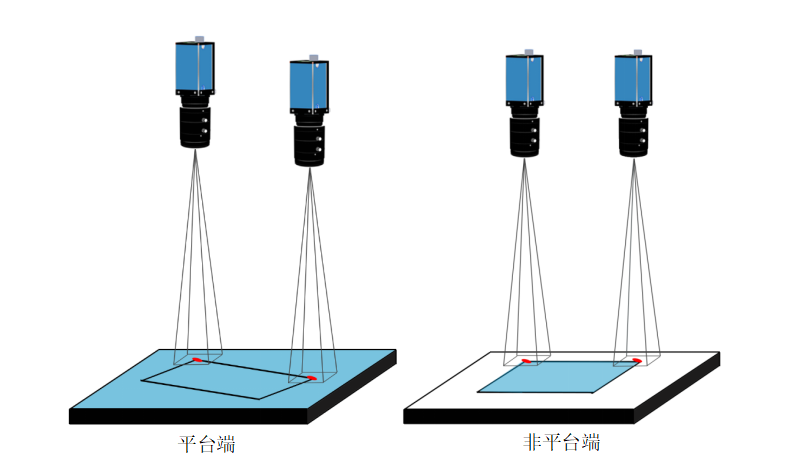
四mark映射對位模型(2)---雙相機模型,如下圖:
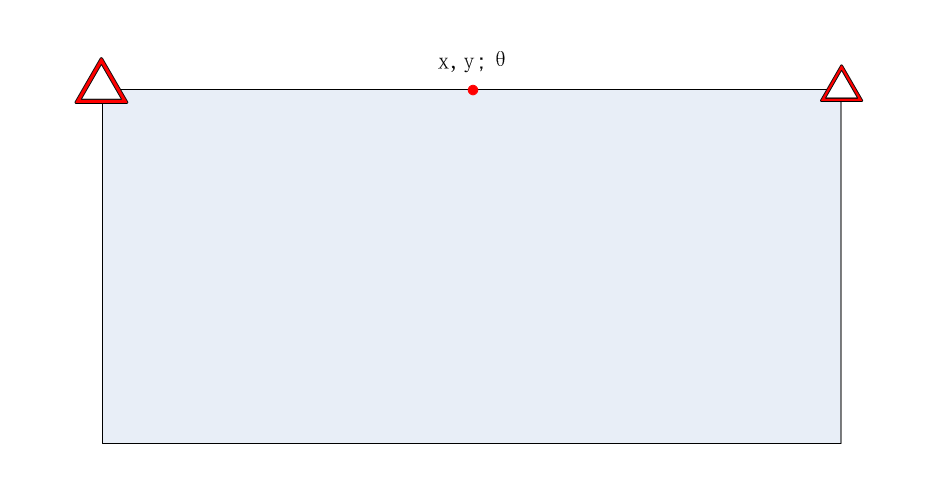
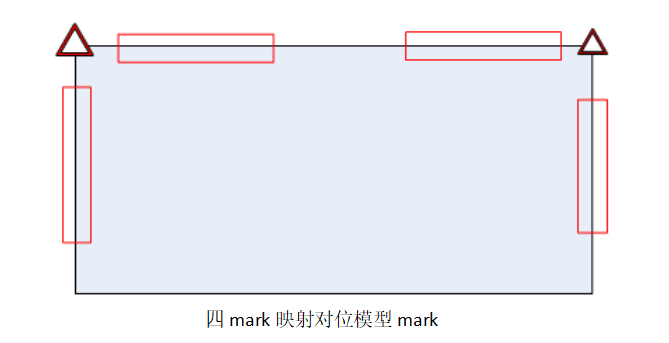
該模型下常見的Mark標志方法如下(同雙Mark自對位):
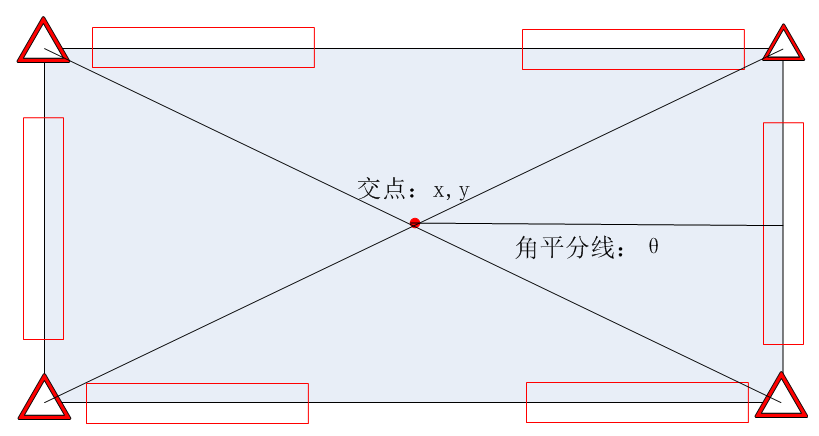
說明:四Mark映射對位有單相機和雙相機兩種情況(平臺端)。單相機模型拍攝完一個Mark點后移動位置拍攝另一個Mark點,雙相機模型兩個相機分別拍攝兩個交點。非平臺端與平臺端拍攝方式相同。得到Mark點后。根據(jù)糾偏算法找到偏移量,根據(jù)偏移量和兩組相機的映射關系將平臺端的產(chǎn)品貼到非平臺端上。
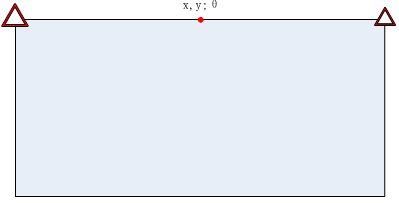
糾偏方法:如上圖所示,糾偏方法同雙Mark自對位,一般使用長邊中點作為(x,y),長邊角度作為θ。區(qū)別在于雙Mark自對位只有平臺端有相機,通過平臺端的拍攝的Mark點和基準Mark點對比;四Mark映射對位的平臺端和非平臺端都有相機,通過平臺端拍攝的Mark點和非平臺端拍攝的Mark點對比。
應用場景:彌補單目雙Mark映射對位在較大尺寸產(chǎn)品時精度不夠的問題,相對單目雙Mark映射對位精度更高
適用產(chǎn)品:較大產(chǎn)品
適用尺寸:100~200mm
精度:±0.05mm
六mark映射對位模型(1)---單相機模型,如下圖:
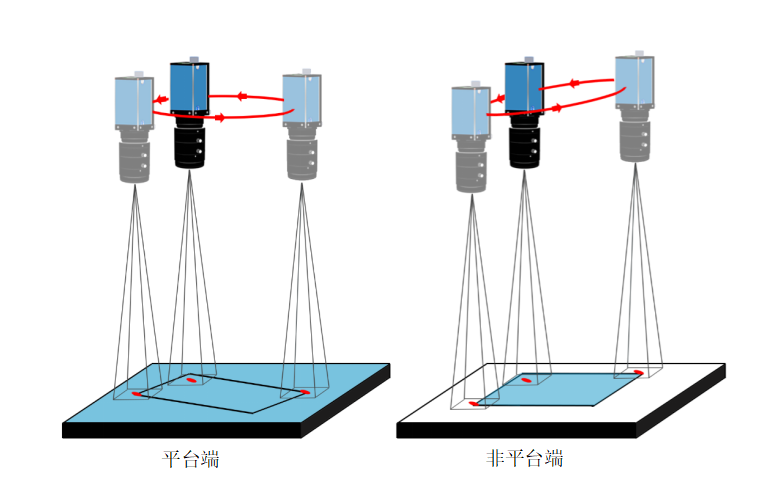
六mark映射對位模型(2)---三相機模型,如下圖:
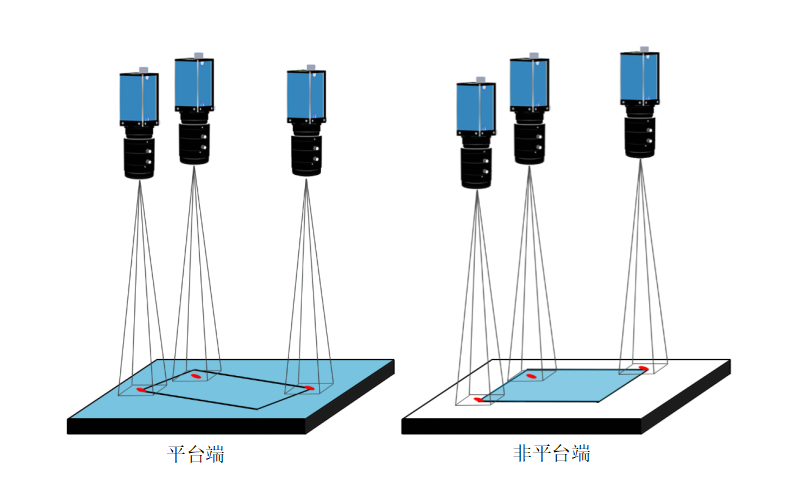
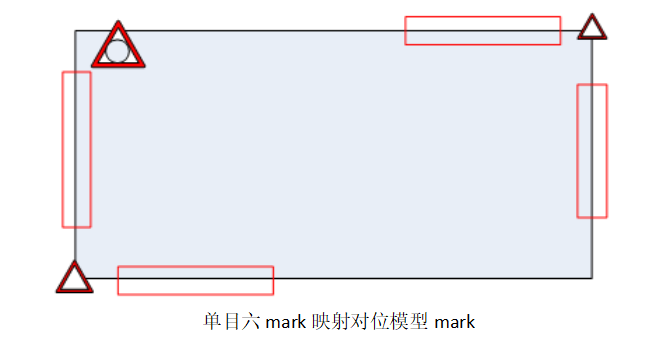
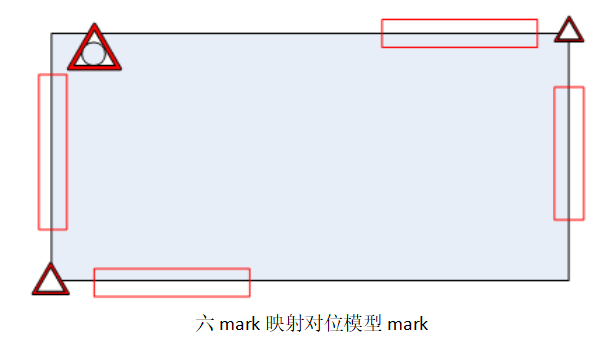
該模型下常見的Mark標志方法如下(同三Mark自對位模型):
說明:六Mark映射對位有單相機和三相機兩種情況(平臺端)。單相機模型拍攝完一個Mark點后移動位置拍攝另一個Mark點,三相機模型三個相機分別拍攝三個Mark點。非平臺端與平臺端拍攝方式相同。得到Mark點后,根據(jù)糾偏算法找到偏移量,根據(jù)偏移量和兩組相機的映射關系將平臺端的產(chǎn)品貼到非平臺端上。
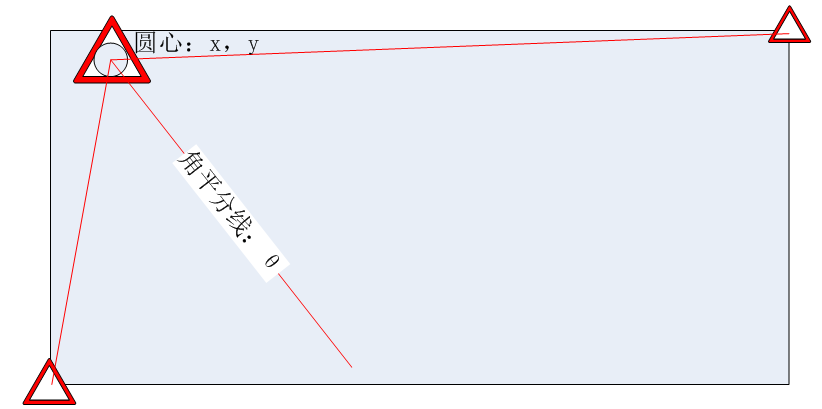
糾偏方法:如上圖所示,糾偏方法同三Mark自對位。
應用場景:該模型并不常用,屬于比較特殊的應用模型,但是相同環(huán)境下精度比單目單/雙Mark更高
適用產(chǎn)品:較大產(chǎn)品
適用尺寸:>200mm
精度:±0.05mm
八mark映射對位模型(1)---單相機模型,如下圖:
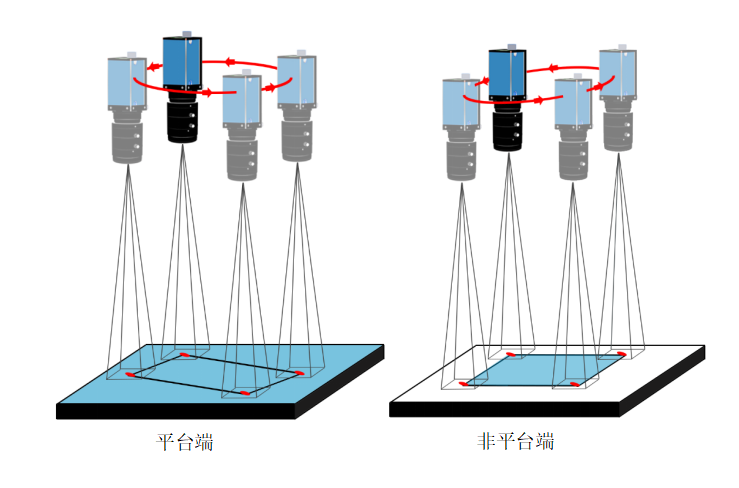
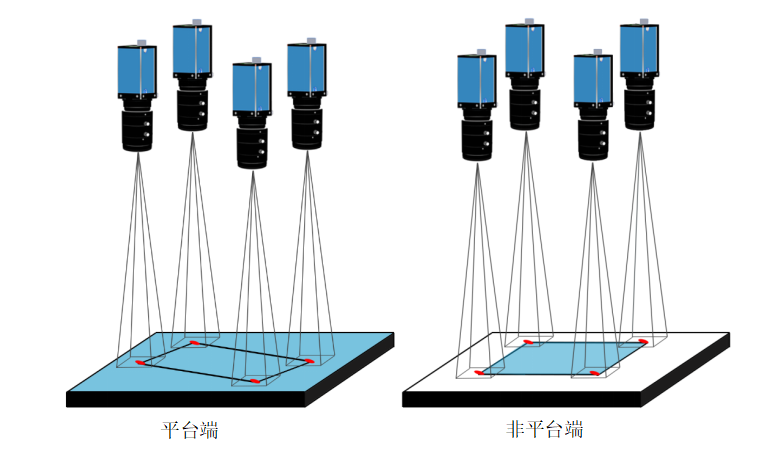
八mark映射對位模型(2)---四相機模型,如下圖:
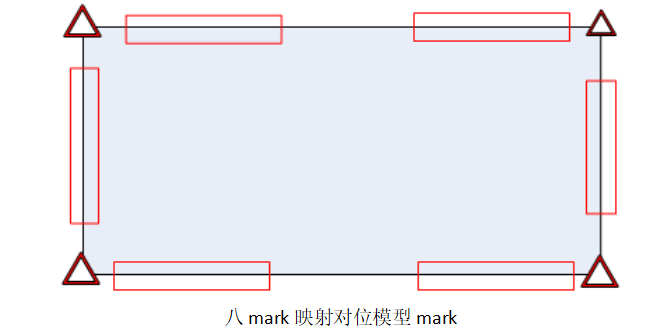
該模型下常見的Mark標志方法如下(同單目四Mark):
說明:八Mark映射對位有單相機和四相機兩種情況(平臺端)。單相機模型拍攝完一個Mark點后移動位置拍攝另一個Mark點,四相機模型的四個相機分別拍攝四個交點。非平臺端和平臺端拍攝方法相同。找出兩端的Mark點后,根據(jù)糾偏算法找到偏移量,根據(jù)偏移量和兩組相機的映射關系將平臺端的產(chǎn)品貼到非平臺端上。
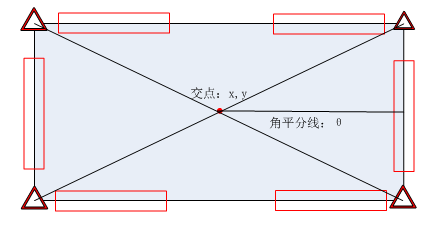
糾偏方法:如上圖所示,糾偏方法同四Mark自對位。
應用場景:用于解決產(chǎn)品尺寸較大,精度不夠的問題。八Mark映射對位精度相比六Mark和四Mark更高
適用產(chǎn)品:較大尺寸產(chǎn)品
適用尺寸:>200mm
精度:±0.05mm
熱線電話:0755-23712116
郵箱:contact@shuangyi-tech.com
地址:深圳市寶安區(qū)沙井街道后亭茅洲山工業(yè)園工業(yè)大廈全至科技創(chuàng)新園科創(chuàng)大廈2層2A
