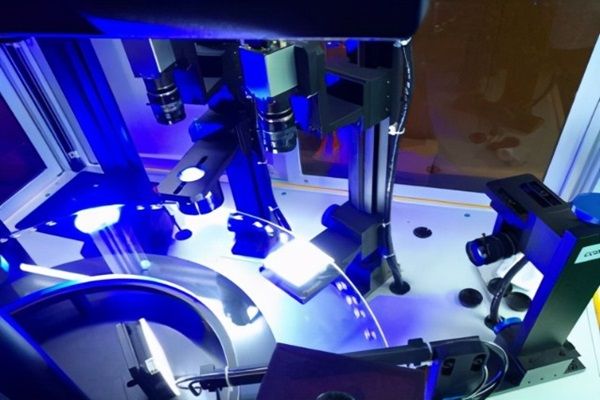
在工業自動化領域,機器視覺對位技術是實現精密制造的核心環節,其本質是通過光學成像與算法解析,精確計算目標物體的位置和姿態偏差,并引導執行機構完成校正。根據應用場景的精度需求、物體尺寸和環境約束,業界發展出多種對位模型,主要可分為自對位模型和映射對位模型兩大類。 自對位模型:單相機高效定位 自對位模型通過機械定位確保目標物體位置固定,僅需在對象端(待調整物體)設置相機進行位置糾偏。其核心流程包括:示教模板位置→實時計算偏移量→機械糾偏→完成貼合。根據標...
2025-07-05 17:15:21